

1. 서 론
2. 관련 연구
3. 연구 방법
3.1 TEASER ++
3.2 GICP(Generalized ICP)
3.3 VGICP(Voxelized GICP)
3.4 GenZ-ICP
3.5 GenZ-VGICP 융합 모델
4. 결 과
5. 고찰 및 결론
1. 서 론
최근 대규모 재난 현장이나 복잡한 지하 구조물 탐사와 같은 고위험, 비정형적 환경에서는 인력의 접근을 최소화하고자 자율주행 로봇을 활용한 지도 생성 및 상황 인식 연구가 활발히 진행되고 있다(Wei et al., 2024). 단일 로봇으로는 넓은 지역을 신속히 탐색하고 장애물을 피해 안전하게 이동하기에 한계가 있으므로, 여러 대의 로봇이 투입되어 각자의 영역을 스캔하고 점군 데이터를 수집하는 방식이 보편화되고 있다(Birk et al., 2006).
하지만 개별 로봇이 수집한 대규모 3차원 점군 맵을 하나의 전역 좌표계로 통합하지 않으면, 현장의 전체 지형이나 구조물을 일관된 형태로 재구성할 수 없고, 후속 의사결정 및 작업에도 제약이 발생할 수 있다(Dubé et al., 2018). 따라서 다수의 로봇이 획득한 점군 맵을 정밀하고 신뢰성 있게 병합하는 기술은 해결되어야 할 핵심 과제이다.
기존 연구들은 이러한 병합 문제를 robot pose graph, GNSS, 학습 기반의 장소 디스크립터 정보 등을 이용하여 해결해왔다(Deutsch et al., 2016). 하지만 이 방법들은 다음과 같은 이유로 실제 환경에서는 적용이 어려울 수 있는 상황이 생긴다. 첫째, 이기종 시스템 간 호환성 문제이다. 현장에 투입되는 로봇들은 각기 다른 SLAM(Simultaneous Localization and Mapping) 구현을 사용할 수 있으며, 좌표계 정의나 pose graph 포맷이 상이하여 실시간 연동이 불가능할 수 있다. 둘째, 재난 환경에서는 강한 충격이나 먼지, 금속 반사 등으로 SLAM이 순간적으로 발산하거나 드리프트를 일으킬 수 있다. 이로 인해 로봇 내부의 pose 정보가 왜곡되거나 누락되어 병합 과정에서 전체 지도가 뒤틀릴 수 있는 문제가 있다(Yu et al., 2025).
이러한 현실적인 제약을 고려할 때, 순수한 기하학적 정보만을 사용하여 정확하고 효율적인 점군 맵(PCD) 병합을 가능하게 하는 방법이 요구된다. 이를 통해 추가적인 센서나 통신 없이도 다양한 환경에서의 로봇 협업과 대규모 점군 맵 병합을 실현할 수 있다.
VGICP(Voxelized Generalized ICP)는 대용량 점군을 복셀로 압축해 연산 부담을 줄이면서도, 복셀의 공분산을 활용해 분포 간 정합을 고려한다는 장점이 있다(Koide et al., 2021). 하지만 복도나 터널 같은 한 방향으로만 기하 정보가 집중된 degenerative(퇴화) 환경에서는 복셀 공분산이 충분한 방향 정보를 제공하지 못해 정합 최적화가 불안정하거나 수렴하지 않을 수 있다.
GenZ-ICP는 점-점과 점-평면을 가중 혼합하고, 가중치를 평면성 지표에 따라 조절함으로써 안정적인 수렴을 달성한다. 복도형 데이터셋에서도 기존 VGICP 대비 낮은 RMSE 와 더 높은 수렴률을 기록해 degenerative 환경에 대한 강건성을 입증하였다(Lee et al., 2024). 하지만 모든 영역에서 GenZ-ICP가 항상 최적의 정합 결과를 제공하지는 않으며, 특정 영역에서는 VGICP가 더 정확한 정합 결과를 나타낼 수 있다.
본 연구에서는 VGICP와 GenZ-ICP 각각의 장점을 통합하여, 복도나 터널같은 degenerative 환경에서도 안정적이고 정확한 정합 성능을 제공할 수 있는 하이브리드 최적화 구조를 제안한다. 제안 기법은 환경의 국부적 평면성에 따라 두 알고리즘의 오차 함수를 임계값 기반 병렬구조로 혼합하여, 단일 최적화 루프 내에서 통합적으로 수행하는 방식이다. 이러한 동적 가중 최적화 구조는 병합의 정확성을 확보하는데 중요한 이점을 제공한다.
또한 ICP(Iterative Closest Point) 계열은 이상치에 민감하므로(Xie et al., 2020), Truncated Least Squares(TLS) 비용 함수를 기반으로 이상치가 많은 대응점 집합에서도 견고한 정합을 수행할 수 있는 TEASER++ 을 이용하여 대규모 점군 간 전역 초기 정렬을 선행한다(Yang et al., 2020). 이후 GenZ-VGICP를 적용하여 정밀한 병합을 수행하는 파이프라인을 구성한다.
이를 통해 다양한 이기종 환경에서도 추가 센서 및 통신 없이 적용가능한 순수 점군 기반 파이프라인을 제시하고, degenerative 환경에서 기존 VGICP 한계를 보완해 대규모 맵을 정밀하고 강건하게 병합함으로써 로봇 협업 실용성을 높이는데 기여하고자 한다.
2. 관련 연구
3차원 점군 맵 병합은 자율주행, 재난 대응, 대규모 환경 탐사 등 다양한 분야에서 핵심 기술로 부상하고 있으며, 효율적이고 정확한 맵 병합을 실현하기 위한 다양한 방법론들이 제안되고 있다.
Stathoulopoulos 등은 사전 위치 정보나 초기정렬 없이도 다중 로봇이 수집한 점군 맵을 병합할 수 있는 프레임워크를 제안하였다(Stathoulopoulos et al., 2024). 이 방법은 학습 기반 place-recognition 디스크립터를 이용해 맵 간 중첩 영역을 신속하게 탐지한 뒤, 해당 영역에서 계산한 균질 rigid 변환을 GICP의 초기값으로 활용하여 정밀 병합을 완성한다. 이러한 접근은 복잡한 지하 환경 실험에서 전통적인 전역 특징 추출 및 매칭 과정을 생략함으로써 처리 속도를 향상시키고, 초기 정렬 없이도 높은 정합 정확도와 강건성을 달성한 점이 특징이다. 반면, 중첩 영역 탐지가 학습된 디스크립터의 매칭 정확도에 크게 의존하므로, 텍스처·기하 형태가 유사하거나 시각적 혼동이 심한 환경에서는 병합 품질이 급격히 저하될 수 있는 한계가 있다.
이러한 디스크립터 의존성에 대한 취약성을 완화하기 위해, Wei 등은 장소 특징 추출, 데이터 연관성 분석, 전역 최적화를 통해 점군 맵을 병합하는 프레임워크를 제안하였다(Wei et al., 2024). 특히 시간적 양방향 필터링을 통해 동적 객체를 제거하고, 루프 클로저에서 이상치를 효율적으로 제거하여 반복적인 환경에서도 높은 정확도를 유지한다. 그러나 빠르게 이동하는 객체가 빈번하거나 구조가 복잡한 장면에서는 잔류 동적 포인트로 인해 중첩 영역 탐지와 전역 최적화 수렴성이 저하되는 한계가 존재한다.
또한, Xie 등은 LiDAR를 사용하여 다양한 지형의 로컬 곡률에 따라 포인트 밀도를 조절하는 지형 적응형 맵 병합 기법을 제안하였다(Xie et al., 2020). 곡률이 큰 영역에서는 높은 밀도를 유지하고, 평탄한 지역은 밀도를 낮춰 데이터 크기를 줄이면서도 중요한 지형 정보를 보존한다. 이를 통해 병합 속도와 정합 정확도를 향상시켰으며, 실내외 실험을 통해 기존 균일 밀도 기반 방법보다 우수한 성능을 입증했으나, 곡률 기반 가중치가 복합 지형에서는 최적이 아닐 수 있다는 제약이 보고되었다.
점군 정합 분야에서는 특히 복도나 터널과 같이 기하학적 특징이 부족한 degenerative 환경에서 안정적인 정합을 달성하는 것이 핵심 과제로 지적되어 왔다. 이러한 환경을 극복하기 위한 최근 접근은 크게 세 가지로 나눌 수 있다. 첫째, 분포 기반 정합의 안정성 강화이다. VGICP는 대용량 점군을 효율적으로 처리하면서도 분포 간 정합을 고려할 수 있으나, 특정 방향으로만 기하 정보가 분포되는 상황에서는 공분산 랭크 부족으로 인해 수렴이 불안정하다 (Koide et al., 2021). 둘째, 기하 기반 접근의 보완이다. GenZ-ICP는 점-점과 점-평면 잔차를 평면성 지표에 따라 가중하여 degenerative 환경에서 안정적 수렴을 보여주지만, 분포 기반 정합의 장점을 충분히 반영하지 못한다 (Lee et al., 2024). 셋째, 학습 기반 기법이다. PREDATOR, GeoTransformer, CoFiNet 등은 낮은 오버랩 및 퇴화 상황에서도 성능을 높이기 위해 overlap-aware attention, 기하 인코딩 등을 도입하였으나, 데이터셋 의존성과 높은 계산 복잡도로 인해 실제 재난 현장 적용에는 제약이 따른다 (Huang et al., 2021; Qin et al., 2022; Yu et al., 2021).
기존 기법들은 각각의 관점에서 degenerative 환경 문제를 부분적으로 완화하였으나, 분포 기반 정합의 통계적 안정성과 기하 기반 정합의 수렴 특성을 동시에 고려하면서 환경 특성에 따라 적응적으로 혼합하는 방식은 충분히 연구되지 않았다. 본 연구는 이러한 공백을 메우기 위해, 복셀 단위의 평면성 지표(LSV)를 활용하여 VGICP와 GenZ-ICP의 잔차를 동적으로 결합하는 하이브리드 정합 구조(GenZ-VGICP)를 제안한다. 이를 통해 기존 VGICP의 퇴화 취약성을 보완하고, GenZ-ICP 단독의 한계를 극복하며, 학습 기반 접근의 복잡성을 피하면서도 다양한 degenerative 환경에서 안정적이고 정확한 맵 병합을 실현한다는 점에서 기여가 있다.
3. 연구 방법
본 연구에서는 대규모 3차원 점군 맵 데이터를 효율적이고 정확하게 정합하기 위해 이상치에 강한 TEASER++를 활용하여 초기 전역 정렬을 수행한다. 이후, VGICP와 GenZ-ICP를 융합한 하이브리드 정합 기법을 제안한다.
3.1 TEASER ++
TEASER++는 대응점 집합에 많은 이상치(outlier)가 포함되어도 전역 최적성을 보장하면서 밀리초 단위로 해를 추정할 수 있는 전역 초기 정렬 알고리즘이다(Yang et al., 2020). 주어진 대응점 에 대해 스케일 , 회전 , 평행이동 을 추정한다.
TEASER++는 이상치를 견고하게 제거하기 위해 잔차가 일정 임계값을 넘으면 손실을 상수로 절단하는 비용 함수, 즉 Truncated Least Squares(TLS) 기반 비용 함수를 사용한다. 이를 통해 이상치가 전체 최적화에 미치는 영향을 자동으로 차단하며, 생성 모델은 다음과 같이 정의된다.
은 inlier의 측정 잡음으로 인 상한을 가지며 는 이상치 보정항으로 inlier일 때는 0, outlier일 경우 임의의 벡터로 정의된다. 이때 정의되는 TLS 최적화 문제는 다음과 같다.
이때 각 항은 잔차가 임계값 를 넘으면 로 고정되어, 해당 대응쌍이 이상치일 경우 손실이 더 이상 증가하지 않도록 한다. 이러한 절단형 비용은 이상치에 강건한 정합을 가능하게 한다.
3.2 GICP(Generalized ICP)
GICP는 기존 ICP 알고리즘을 확장하여, 각 점을 국부적인 가우시안 분포로 모델링하고, 이들 분포간의 마할라노비스 거리를 최소화하여 정합을 수행한다. 주어진 source 점군 와 target 점군 에 대해, 각 점의 국부 분포는 평균 , 와 공분산 , 로 표현된다. 이때, 오차는 다음과 같이 정의된다.
따라서 최적의 변환 T는 다음의 마할라노비스 거리를 최소화하여 구한다.
3.3 VGICP(Voxelized GICP)
Voxelized GICP는 GICP의 확장된 방법으로, 점군을 복셀 단위로 분할하여 각 복셀 내의 점들의 분포를 평균과 공분산으로 모델링한다. 이러한 접근은 계산 효율성을 높이고, 대규모 점군 데이터의 정합에 유리하다. GICP는 매 source 점 마다 1:1 대응 target 점을 찾고 해당 점의 분포를 사용한다. VGICP는 target 점군을 복셀 단위로 나누고 각 복셀 내 점들의 평균 및 공분산을 미리 계산하여 저장한다. 대응점의 분포를 찾는 대신 source 점 주변에 위치한 복셀들의 평균 분포를 직접 사용하여 계산의 효율성을 향상시키는 방식을 채택한다.
구체적으로, source 점군 와 주변에 있는 모든 target 이웃점 가 주어졌을때, 각 점은 다음과 같은 정규분포로 근사된다.
Source 점 주변의 이웃 target 복셀 내에 포함된 점의 개수를 라고 할 때 오차와 최적의 변환 는 다음과 같이 계산된다.
이러한 방식으로 VGICP는 GICP의 정합 정확도를 유지하면서도, 복셀 기반의 접근을 통해 계산효율성을 향상시킨다.
3.4 GenZ-ICP
GenZ-ICP는 기존 ICP의 점-점 정합과 점-평면 정합 방식을 가중 혼합하여 퇴화 환경에서의 수렴 성능을 향상시킨다. 주어진 source 점군 X의 점 에 대한 target 점군 Y에서 대응되는 가까운 이웃점을 라고 할때, GenZ-ICP에서의 오차 함수는 다음과 같이 정의된다.
여기서 는 타겟 점군에서 점 주변 국부적으로 계산된 평면의 법선벡터이며, 는 해당 지역의 평면성(planarity)에 따라 동적으로 설정되는 가중치이다. 즉, 평면성이 높은 영역에서는 점-평면 정합을 주로 수행하고, 낮은 영역에서는 점-점 정합을 강조하여 퇴화 환경에서도 안정적인 수렴 특성을 보장한다.
3.5 GenZ-VGICP 융합 모델
본 연구에서는 VGICP의 degenerative 환경에서 보이는 정합 정확도의 한계를 보완하기 위해 GenZ-ICP의 강점을 활용하여 다양한 환경에서도 강건한 정합을 수행하기 위한 하이브리드 정합 모델인 GenZ-VGICP를 제안한다. 기존 VGICP는 복셀 기반으로 대용량 데이터의 효율적인 정합을 지원하지만, 복도나 터널과 같은 degenerative 환경에서는 복셀 공분산의 유효 차원이 부족하여 정합 정확도가 저하될 수 있다. 반면 GenZ-ICP는 점-점과 점-평면 정합을 지역적 평면성에 따라 가중 혼합함으로써 degenerative 환경에서도 안정적으로 수렴하는 강점을 가진다.
이러한 두 가지 방법의 특성을 평면성에 따라 적응적으로 활용하는 임계값 기반 하이브리드 정합 기법을 제안한다. 전체 오차 함수는 두 알고리즘의 오차항을 가중치 를 사용하여 아래와 같이 결합하여 정의된다.
여기서 는 VGICP에서 사용하는 복셀 간 분포 기반의 마할라노비스 거리 최소화 오차이며, 는 GenZ-ICP의 지역적 평면성을 기반으로 하는 점-점 및 점-평면 오차이다.
각 복셀에서의 국부적인 평면성을 수치적으로 정의하기 위해 복셀 공분산 행렬의 고유값(eigen value)을 사용하여 Local surface variation(LSV)을 정의한다. 복셀의 공분산 행렬의 고유값을 크기순 으로 정렬할 때, LSV는 다음과 같이 정의된다.
LSV는 국부적 표면의 특성을 나타내는 지표로, 이 값이 작을수록 복셀 내부의 점들이 평면 형태로 분포함을 의미하며, 값이 클수록 점들이 곡면 또는 복잡한 형태로 분포되어 있음을 의미한다(Lee et al., 2024). LSV 지표를 사용하여 하한 임계값 과 상한 임계값 을 설정하고, 다음과 같이 를 설정한다. 의 첨자 는 복셀을 의미하며, 는 각 복셀의 LSV에 따라 동적으로 결정되는 가중치이다.
복셀의 LSV가 설정된 하한 임계값보다 낮다면 평면성이 높아 GenZ-ICP만 수행한다. 반대로 LSV가 설정된 상한 임계값보다 높다면 VGICP만 수행하게 된다. 중간의 경우에는 두 가지 방식을 가중 혼합하여 각 알고리즘의 장점을 최대한 활용한다.
위 수식을 통해 평면성이 높은 영역에서는 GenZ-ICP를, 곡면이나 불규칙한 영역에서는 VGICP를 우선적으로 적용하여 degenerative 환경에서도 보다 정확하고 안정적인 점군 정합을 가능하게 한다.
4. 결 과
본 연구에서는 KITTI 데이터셋과 degenerative 환경 데이터셋을 사용하여 제안한 GenZ-VGICP의 성능을 검증하였다. 전역 초기 정렬은 TEASER++로 수행하였으며, 이후 VGICP와 제안한 GenZ-VGICP를 각각 적용하여 세부 병합 성능을 평가하였다.
정량적 성능 평가를 위해 CloudCompare 오픈소스 소프트웨어를 활용하여 ground truth를 산출하였다. 평가 지표는 translation 오차(), rotation 오차(), 그리고 처리 시간이며 각 오차는 다음과 같이 정의된다.
여기서 은 추정된 translation 및 rotation 값이며 , 는 CloudCompare를 통해 계산된 ground truth이다. Ground truth는 다음 절차로 산출하였다. 먼저 두 점군 맵을 대략적으로 수동 정렬한 뒤, CloudCompare의 기능을 실행하여 자동으로 정밀 정합을 수행하였다. 정합이 수렴하면 소프트웨어가 출력하는 4×4 변환행렬을 최종 ground truth 변환으로 사용하였다(Stathoulopoulos et al., 2024).
Fig. 2는 전역 초기 정렬인 TEASER++ 을 사용하지 않고 VGICP와 GenZ-VGICP를 단독 실행한 결과이다. 두 방법 모두 초기 정렬이 부족할 경우 대규모 맵 병합에서 수렴하지 못하는 현상이 관찰된다.
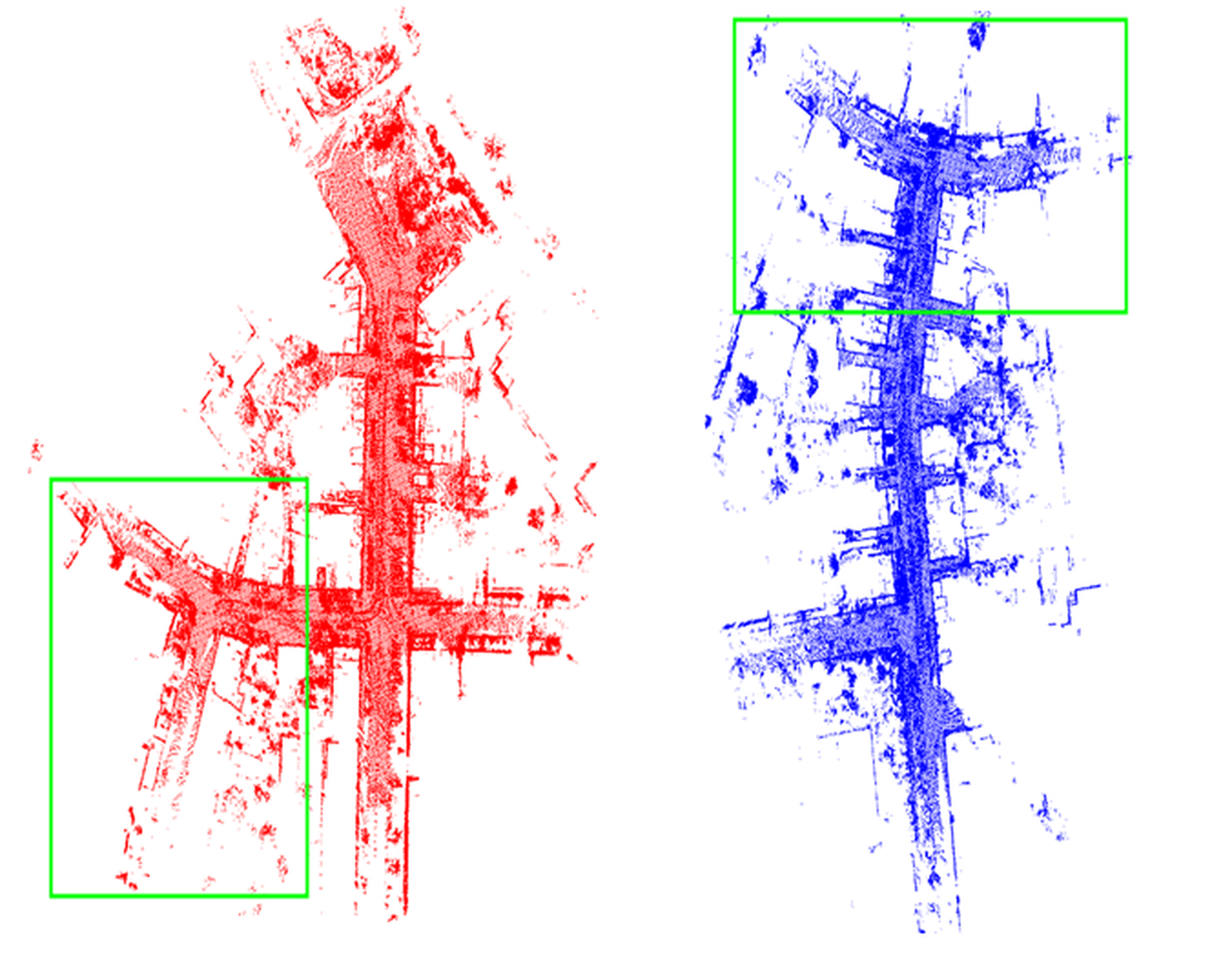
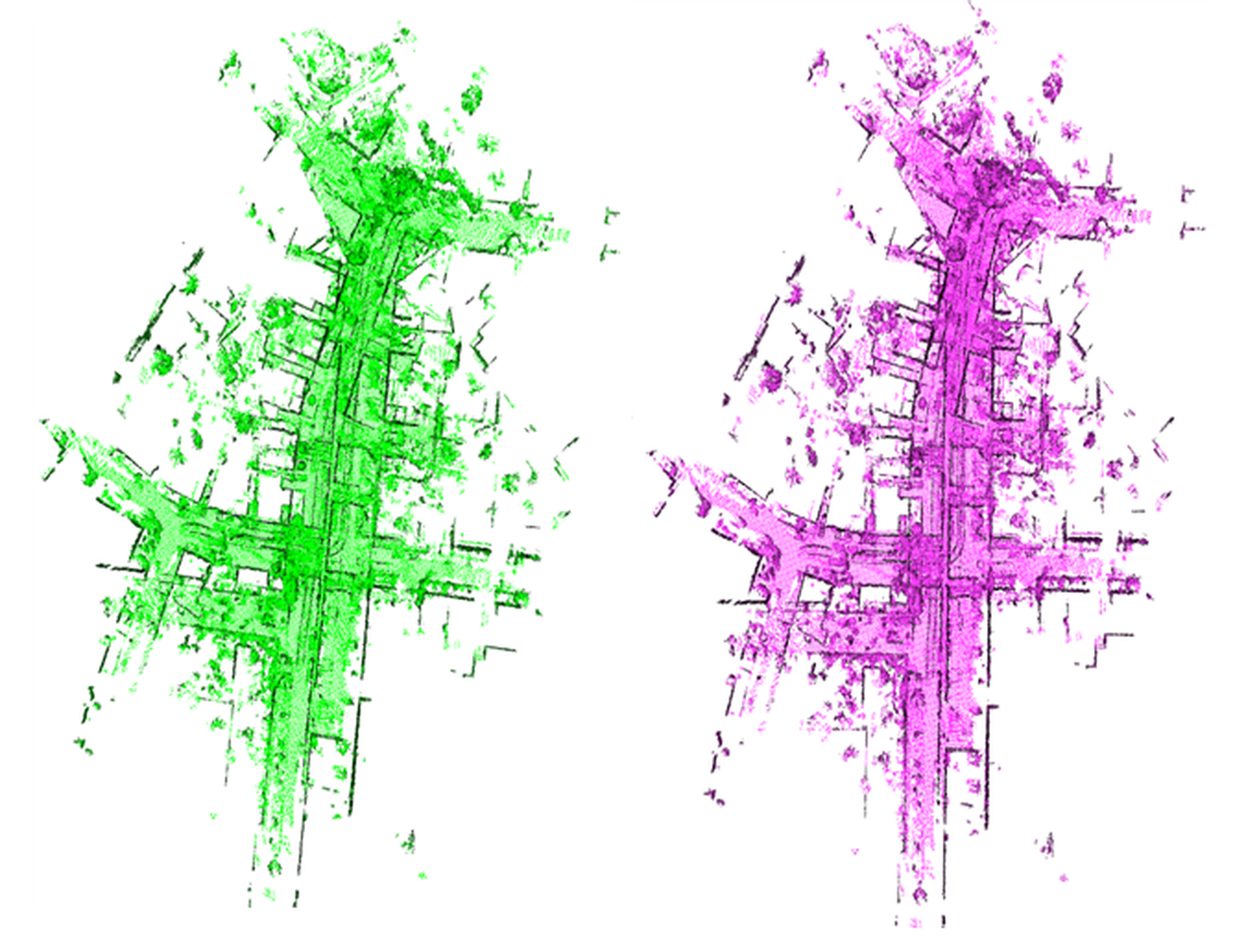
Fig. 3, Fig. 4는 TEASER++을 사용하여 전역 초기 정렬을 해준 뒤 각각의 방법을 사용하여 세부 정합을 해준 결과이다. Table 1은 KITTI 데이터셋에서 VGICP와 제안한 GenZ-VGICP를 이용한 맵 병합 실험의 정량적인 결과를 나타낸다.

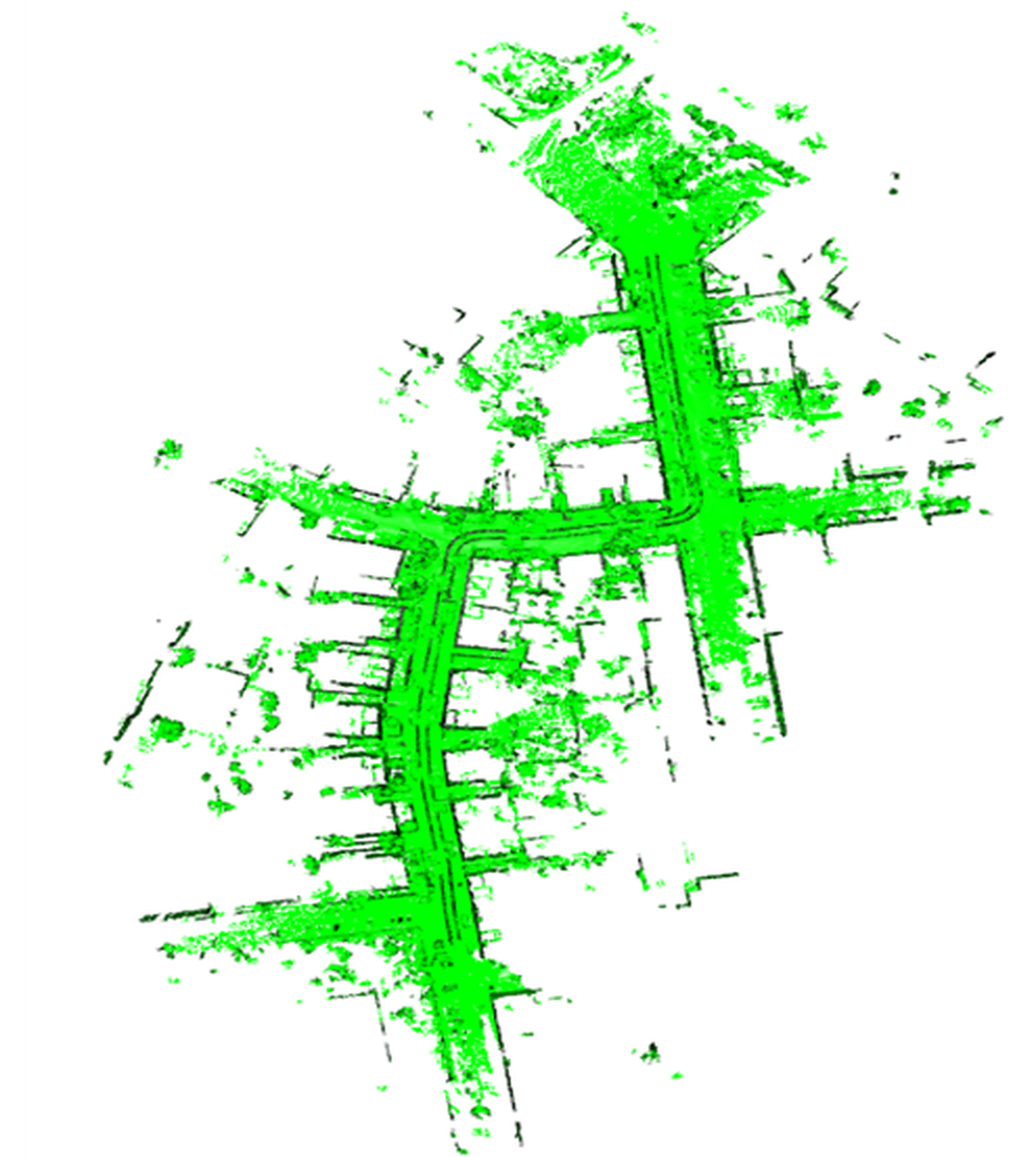
Table 1.
The experimental metric results
| (m) | (deg) | Time (s) | |
| VGICP | 0.87 | 0.434 | 0.482 |
| GenZ-VGICP | 0.85 | 0.429 | 0.654 |
다음으로는 degenerative 환경에서의 데이터셋을 사용하여 병합 결과를 나타냈다. Fig. 5는 degenerative 환경인 복도의 ground truth 점군 맵 데이터이다. Fig. 6에서는 degenerative 환경을 두 구간 과 로 나누었다.
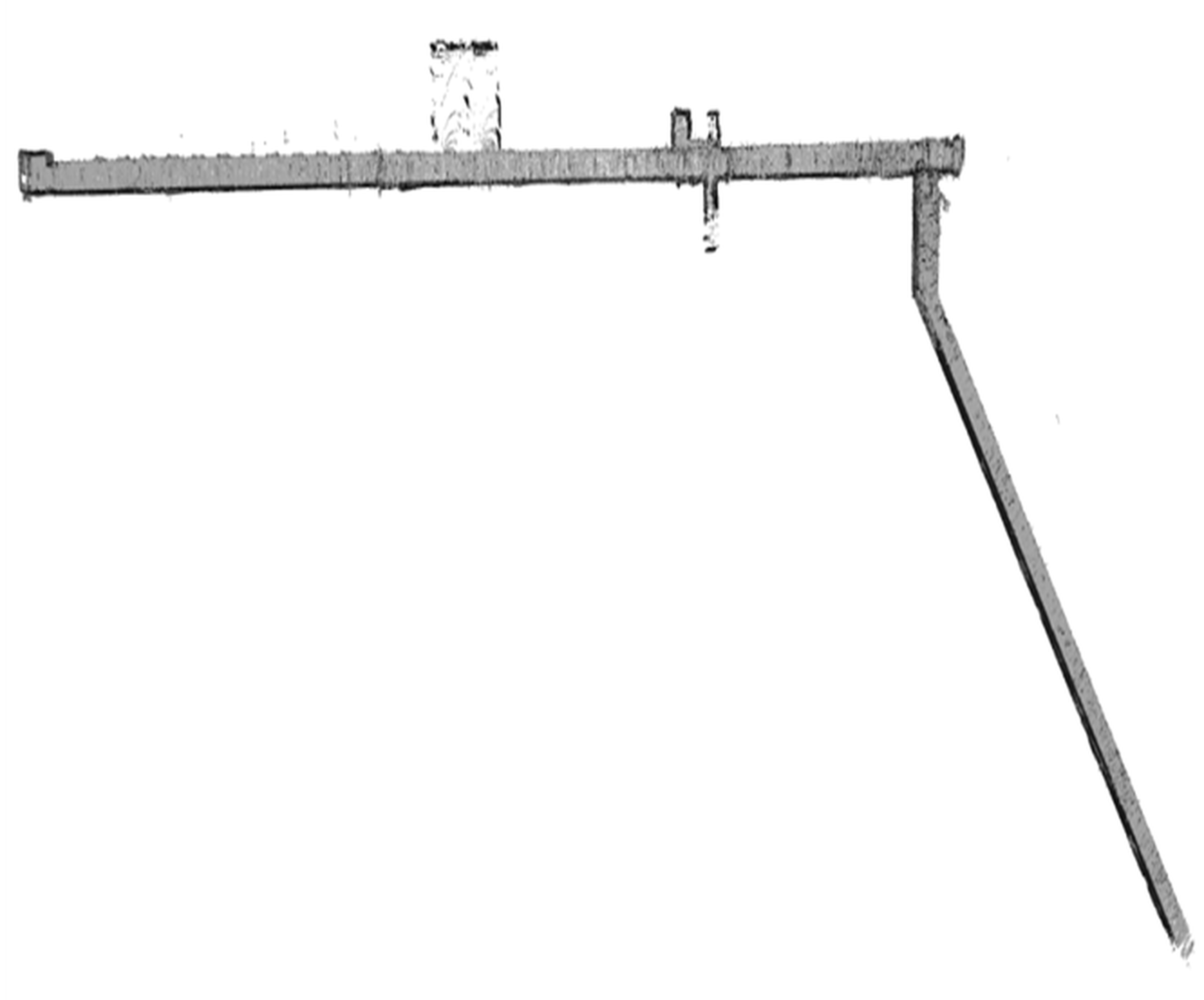
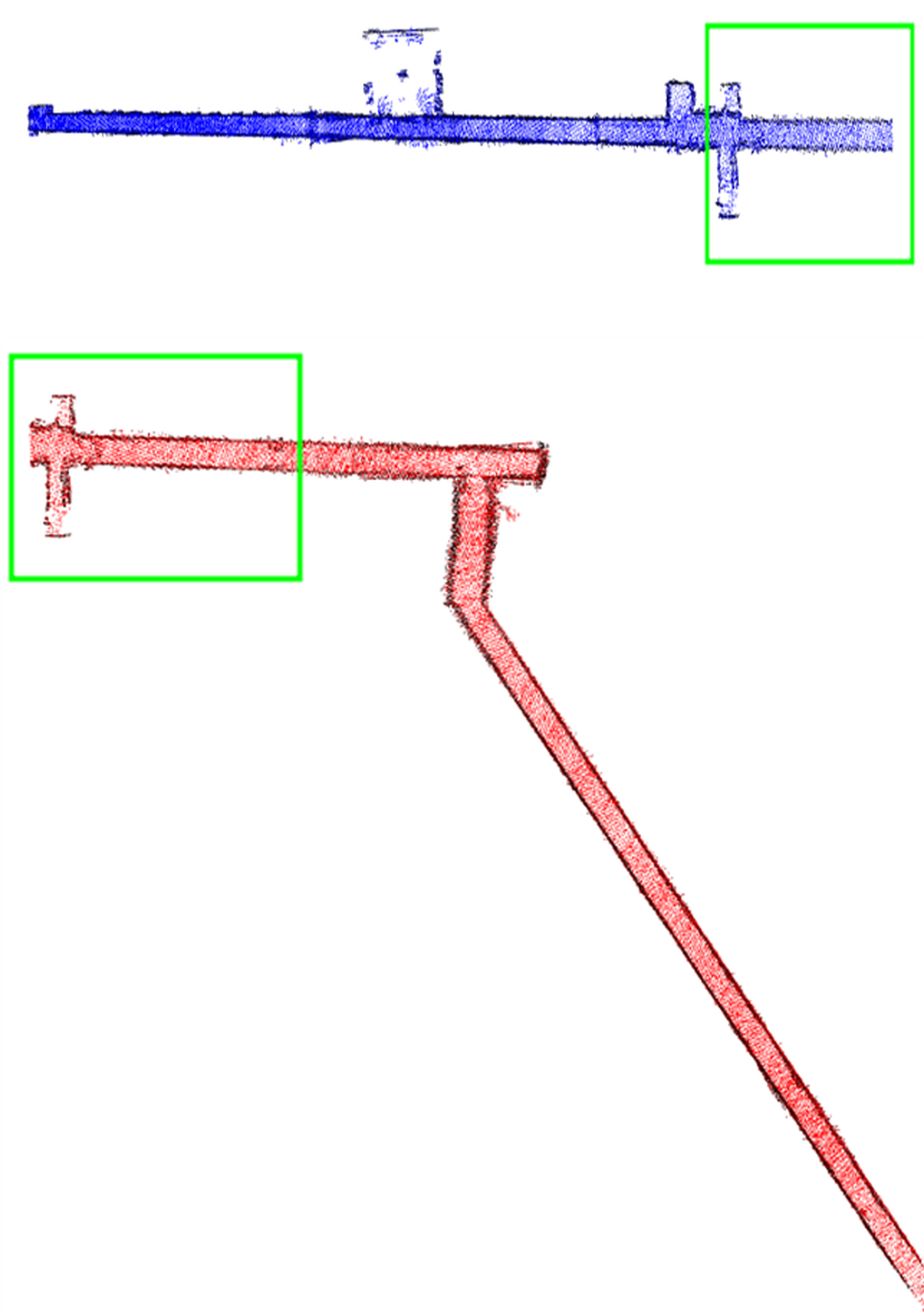
Fig. 7, Fig. 8, Fig. 9, Fig. 10은 각각 ICP, GenZ-ICP, VGICP와 GenZ-VGICP를 사용하여 degenerative 환경 점군 데이터를 병합한 결과이다.
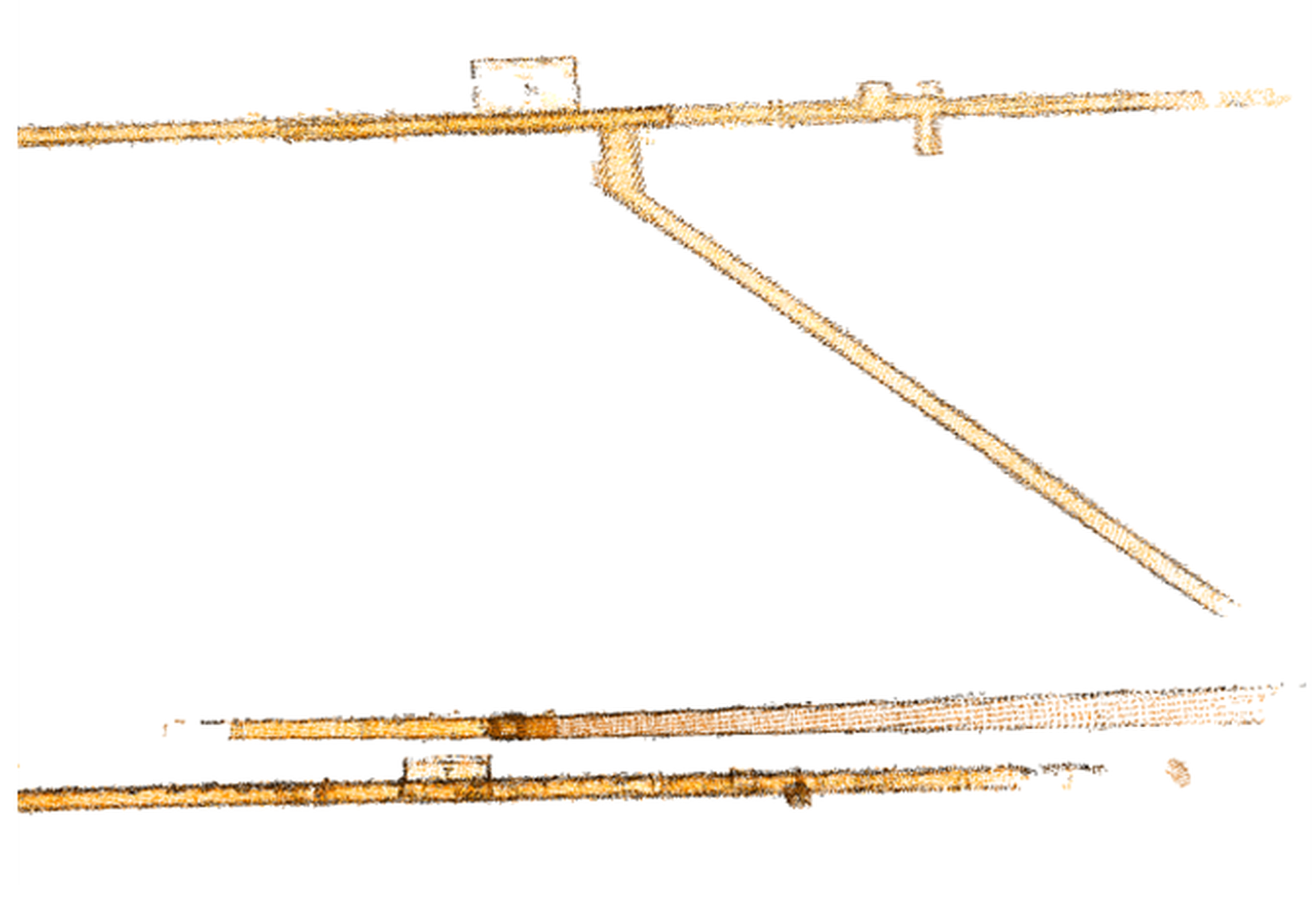
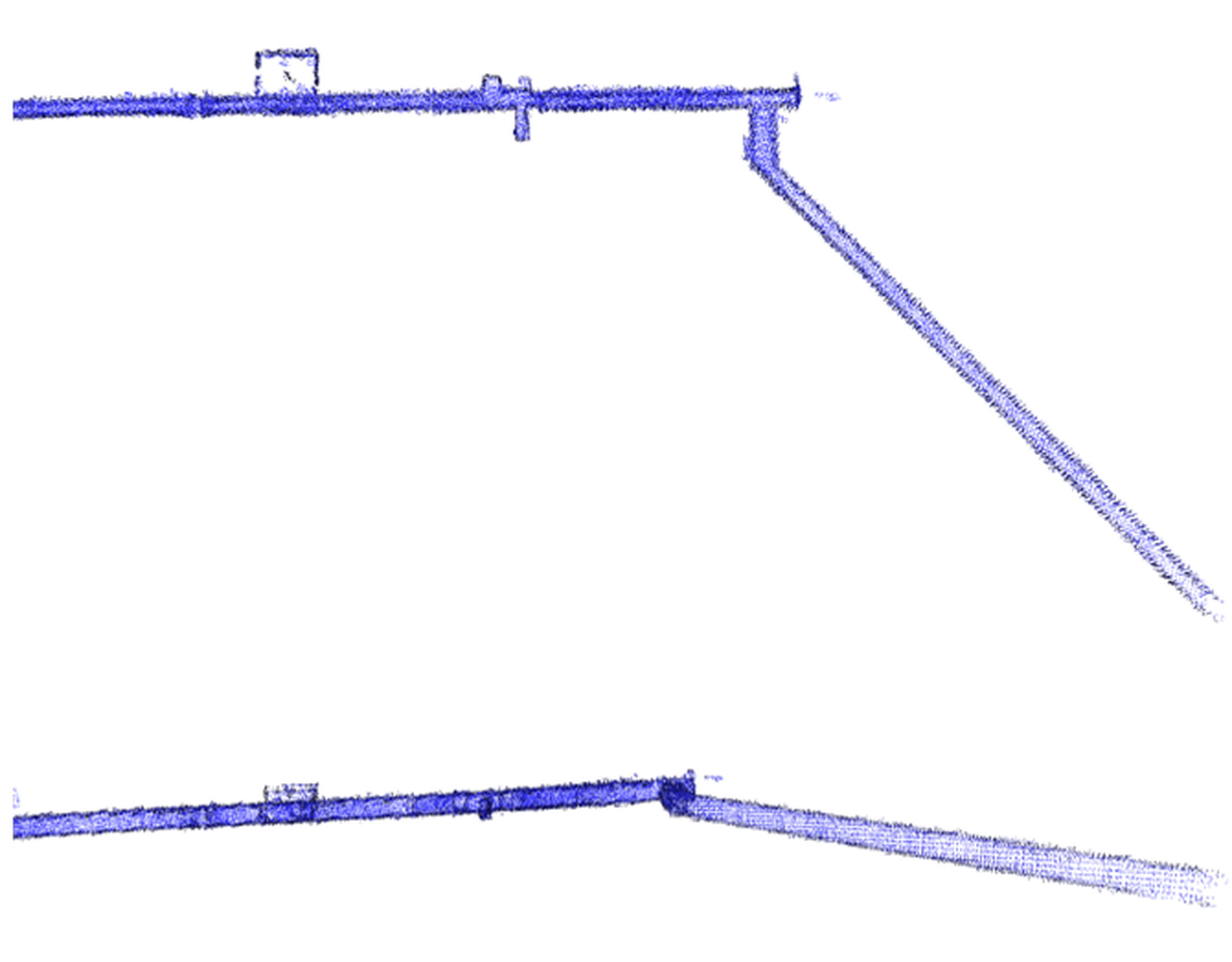
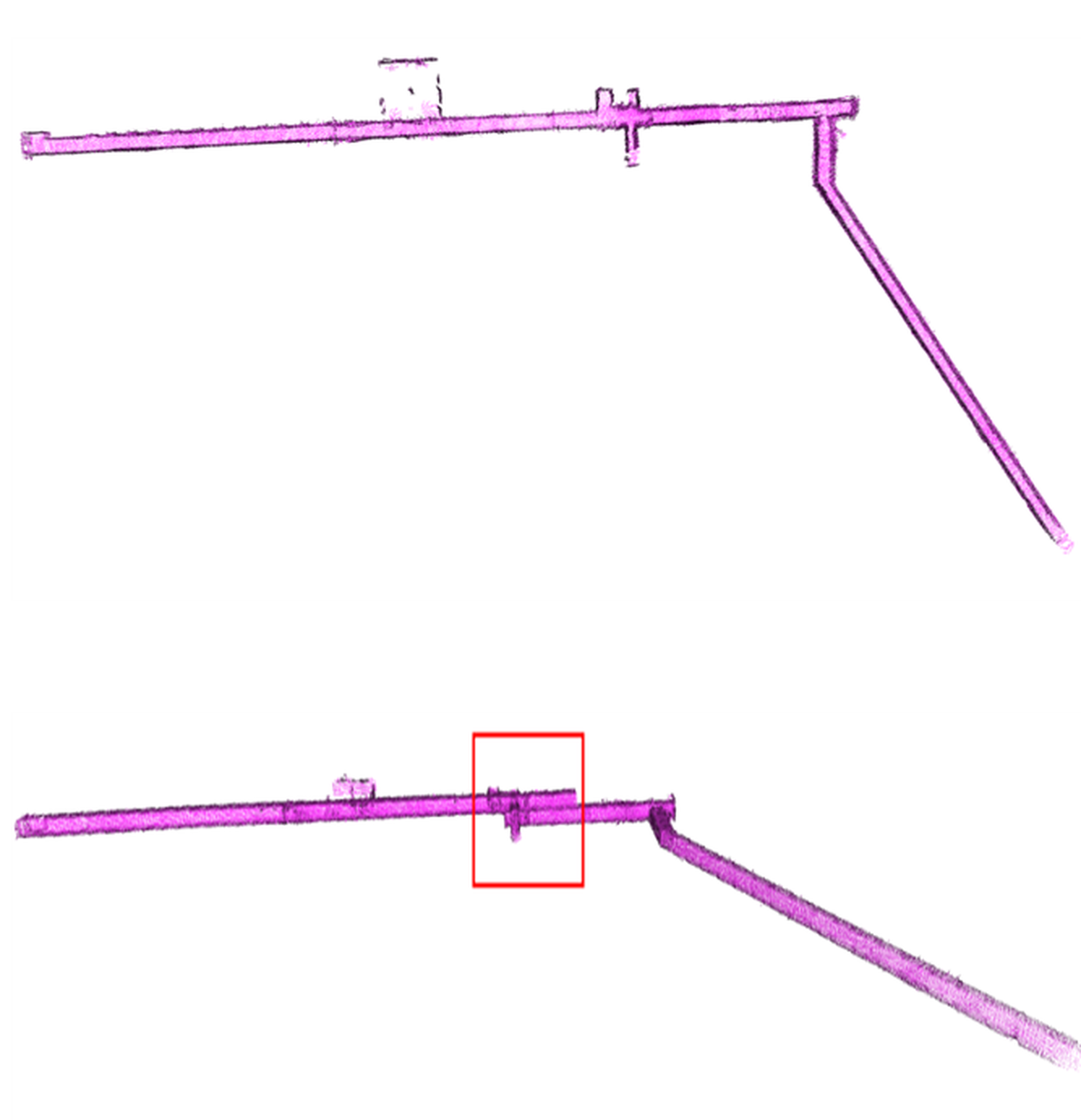
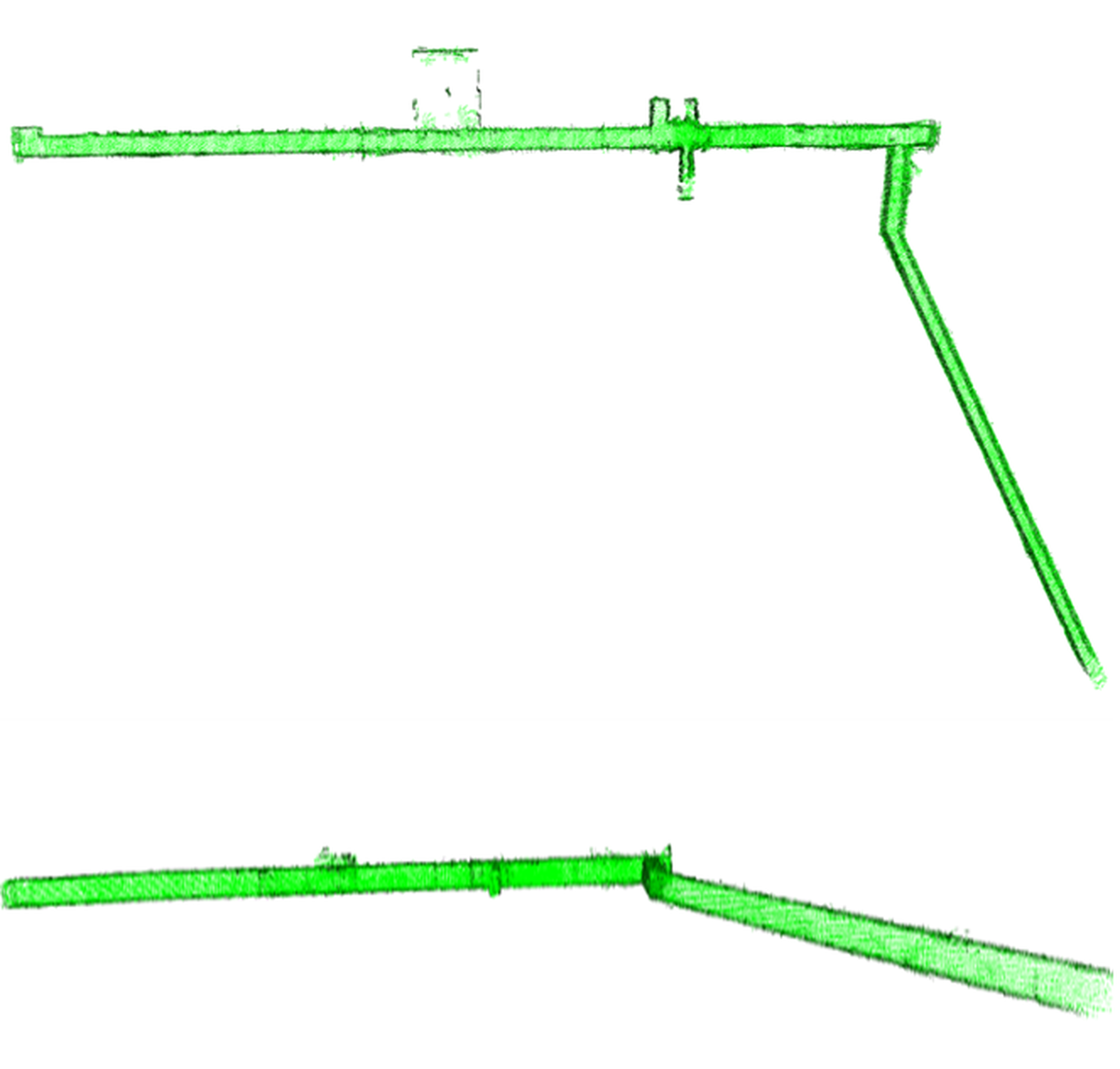
Table 2는 degenerative 환경 데이터셋에서 수행한 맵 병합의 정량적 결과를 나타낸다.
5. 고찰 및 결론
본 연구에서는 KITTI 데이터셋과 퇴화 환경 데이터셋을 대상으로 제안한 GenZ-VGICP의 성능을 평가하였다. KITTI와 같은 일반적인 비정형 환경에서는 VGICP와 제안 기법(GenZ-VGICP)을 비교하였으며, 복도와 같은 퇴화 환경에서는 ICP, GenZ-ICP, VGICP와 함께 제안 기법을 포함한 네 가지 방법을 비교하였다.
실험 결과, KITTI 데이터셋과 같은 일반적인 비정형 환경에서는 정합 정확도에서 유의미한 성능 차이를 보이지 않았다. Table 1의 정량적 결과에서 확인할 수 있듯이, VGICP와 GenZ-VGICP는 각각 0.87m와 0.85m의 translation 오차, 0.434 deg와 0.429 deg의 rotation 오차로 근소한 성능 차이를 나타냈다. 이는 KITTI 데이터셋이 다양한 방향의 기하학적 특징을 포함하고 있어, VGICP만으로도 충분한 정합 정확도를 달성할 수 있었기 때문으로 판단된다.
반면, 퇴화 환경에서는 알고리즘 별 차이가 뚜렷하게 드러났다. Fig. 7에서 확인할 수 있듯이 ICP는 translation 오차 78.3m, rotation 오차 14.4°로 정합에 사실상 실패하였고, 이는 단순 점-점 기반 접근의 한계를 보여준다. Fig. 9에서와 같이 VGICP 역시 top view 관점에서는 병합이 적절히 수행된 것처럼 보이나, lateral view에서는 높이 방향에서 명확한 불일치가 발생했다. 이는 VGICP가 복셀 공분산의 유효 차원이 부족하여 안정적인 수렴을 이루지 못한 것으로 판단된다. GenZ-ICP는 평면성 기반 가중치를 통해 ICP보다 개선된 결과(0.33m, 1.4°)를 보였으나, 여전히 제안 기법 대비 오차가 컸으며 처리 시간(0.53s) 또한 GenZ-VGICP(0.132s)보다 길어 효율성 면에서 불리하였다. 이에 비해 GenZ-VGICP는 translation 오차 0.19m, rotation 오차 1.22°를 기록하며 가장 낮은 오차와 가장 짧은 처리 시간을 동시에 달성하였다.
이러한 결과는 몇 가지 중요한 시사점을 제공한다. 첫째, baseline인 ICP는 복잡한 실제 환경에서는 적용하기 어렵다는 점이 재확인되었다. 둘째, GenZ-ICP는 강건성을 제공하지만 시간 효율성이 떨어져 대규모 맵 병합에는 비효율적이다. 셋째, VGICP는 일반 환경에서는 충분히 성능을 발휘할 수 있으나 퇴화 환경에서는 불안정성이 드러났다. 마지막으로, 제안한 GenZ-VGICP는 분포 기반 정합의 통계적 안정성과 기하 기반 정합의 수렴 특성을 결합하여 정확성과 효율성을 동시에 달성했으며, 학습 기반 기법에서 흔히 나타나는 데이터셋 의존성과 높은 계산 복잡성을 피하면서도 실환경 적용이 가능하다는 실용적 장점을 입증하였다.
결론적으로 본 연구에서 제안한 방법은 각 접근법의 장점을 환경에 따라 적응적으로 융합하여, 일반 환경에서는 VGICP와 유사한 성능을 유지하고 퇴화 환경에서는 VGICP의 한계를 효과적으로 보완하여 개선된 정합 성능을 제공함을 입증하였다. 이러한 하이브리드 정합 방식은 복도, 터미널 등 단조로운 구조를 갖는 실환경에서 대규모 점군 맵 병합의 신뢰성과 실용성을 높이는데 기여할 수 있을 것으로 기대된다.
본 연구의 한계점은 실험 환경이 특정 공개 데이터셋(KITTI, 복도형 맵)에 한정되어 있어, 다양한 실제 현장 환경에 대한 일반화에는 추가적인 검증이 필요하다는 점이다. 향후 연구로는 실제 재난 현장과 같이 더 다양한 형태의 퇴화 환경을 반영한 추가 데이터셋 구축과 이에 대한 실험적 평가를 수행할 예정이다. 또한 센서 노이즈, 부분적 데이터 손실, 동적 장애물 등 실제 응용 상황에서 발생할 수 있는 다양한 문제 상황에 대해 성능을 검증하고 알고리즘을 고도화하는 방향으로 연구를 지속할 예정이다.
