

1. 서 론
2. 하지 근력 보조 외골격의 설계
2.1 하지 근력 로봇의 구조
2.2 가스스프링을 이용한 하지 근력 보조
3. 하지 근력 보조 외골격의 근 활성도 감소 실험
3.1 실험장비 및 사용 프로그램
3.2 실험대상 및 실험과정
3.3 근 활성도 분석 실험 결과
4. 결 론
1. 서 론
건설 현장에서 사람의 노동력을 대체해줄 지게차, 크레인 같은 기계들이 많이 개발되었다. 그러나 작업 환경에 따라서는 사람이 중량물을 운반하거나 크고 작은 작업 공구를 다루는 작업은 여전히 많이 존재한다. 특히 건설업과 같이 중량물을 반복적으로 다루는 작업은 근로자의 근·골격계에 과도한 부하를 주게 되며, 건설 현장에서 앉기와 일어나기를 반복하는 작업은 작업자의 하지에 악영향을 주게된다(Lee, 1999). 또한 건설 현장에서 고령자가 많아짐에 따라 근로자들의 근·골격계 질환이 더욱 쉽게 발생할 수 있다(Lee, 2018; Kim, 2021).
이러한 문제를 해결하고자 근력 보조 외골격 로봇이 개발되어왔다. 외골격 로봇은 수동형과 능동형 외골격 로봇으로 나눌 수 있는데, 수동형 외골격 로봇은 외부 동력을 제공받지 않고, 능동형은 외부 동력을 제공받는 차이점이 있다. Table 1에는 수동형과 능동형 외골격 로봇의 개발 사례가 나와있다. 외부 동력을 제공받지 않는 수동형 외골격 로봇은 스프링을 통한 근력 보조 또는 구조적인 하중 지지로 착용자의 근력을 정적으로 보조하는 경우가 많다. 능동형 외골격 로봇은 외부 동력을 제공받아 의료용 또는 산업용으로 사용된다. 의료용은 외부 동력을 이용해 보행이 어려운 보행자의 근력을 보조하거나, 산업용은 짐을 들거나 옮기는데 근력을 보조해준다.
Table 1의 Noonee나 Exso vest와 같이 기존의 수동형 하지 근력 보조 외골격 로봇의 경우, 주로 정적 과정에서의 근력 보조만을 제공하고 동적 과정에서는 근력 보조를 제공하지 못한다는 한계점이 있다. 본 연구에서는 건설 현장에서의 반복적인 앉기 및 일어서기 작업에 의한 정적 근력 보조와 동적 근력 보조를 모두 제공하는 수동형 하지 근력 보조 외골격 로봇을 제안하였다. 제안된 수동형 하지 근력 보조 외골격 로봇은 착용자의 종아리와 허벅지 사이에서 보조력을 제공하여 정적 및 동적 과정에서 허벅지의 근력을 보조하는 것을 목적으로 하며, 보조력을 생성하기 위해 가스스프링을 사용하였다. 또한 사람의 신체 길이에 따른 링크길이 조절이 가능하고 보행 시 불편함을 최소화하기 위해 자유구간이 설정되어 있다. 평지로 구성된 작업 현장에서 앉기와 일어서기를 반복하여 착용 전후 발생하는 근활성도를 근전도센서를 이용해 측정함으로써 개발한 외골격 로봇의 효과를 정량적으로 평가하였다.
Table 1.
Conventional exoskeleton wearable robots
| Passive types | |||
| Features | Picture | Fetures | Picture |
|
- Nation : Germany - Application : Industrial work - Name : Noonee (Coxworth, 2022) - Body part : Lower limb |  |
- Nation : USA - Application : Industrial work - Name : Ekso vest (Mas, 2020) - Body part : Upper limb |  |
| Active types | |||
| Features | Picture | Fetures | Picture |
|
- Nation : Japan - Application : Industrial work - Name : ATOUN Model Y (Coxworth, 2019) - Body part : Waist |  |
- Nation : Japan - Application : Rehabitation - Name : HAL (Muto, 2022) - Body part : Lower limb |  |
2. 하지 근력 보조 외골격의 설계
2.1 하지 근력 로봇의 구조
외골격 로봇은 사람이 착용할 수 있는 로봇이므로 움직임에 따른 불편함이 최소화되어야 한다(Fatai et al., 2019). 사람마다 종아리 길이, 허벅지 길이 등이 다르므로 링크 길이 조절이 가능하게 제작하였다. Fig. 1에는 본 연구에서 개발된 외골격 로봇의 주요 구성품을 보여준다. 로봇의 전체 크기는 높이 약 1,300~1,430mm, 너비 395~615mm, 깊이 180~240mm 이다. 외골격 로봇은 어깨, 허리, 허벅지, 종아리 그리고 발에 하네스로 체결된다. 부품은 경량화를 위해 대부분을 알루미늄으로 선정했으며, 전체 무게는 13.6kg이다. 외골격 로봇의 자유도(DOF, Degrees of Freedom)는 총 10이다. 발목 1개, 무릎 1개, 허벅지 부품 1개, 골반 2개로 양쪽이 합쳐 10개의 자유도를 이루고 있으며, 관절 회전 범위는 Table 2에 나타내었다.
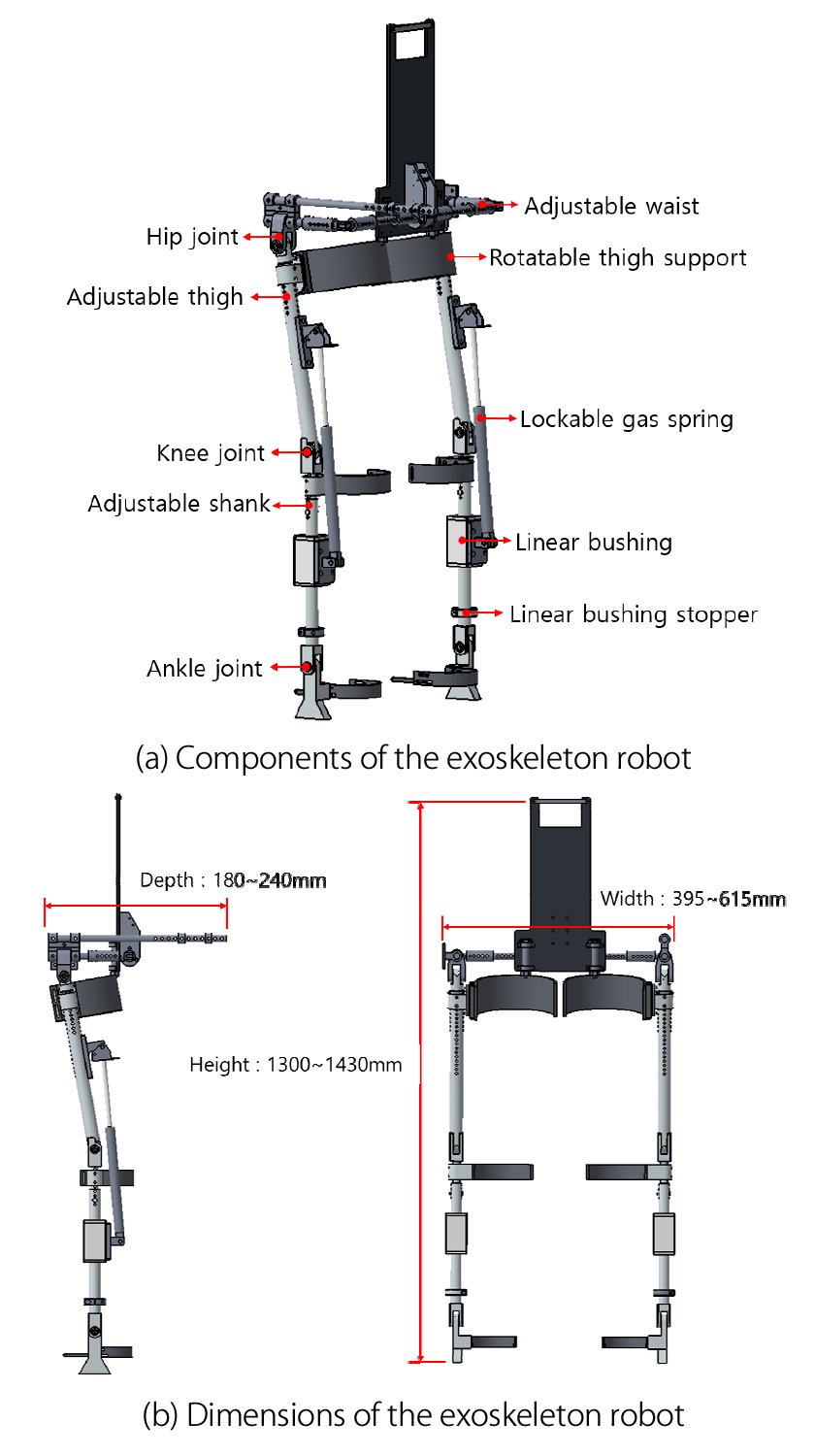
Table 2.
Ranges of motion of the exoskeleton robot
2.2 가스스프링을 이용한 하지 근력 보조
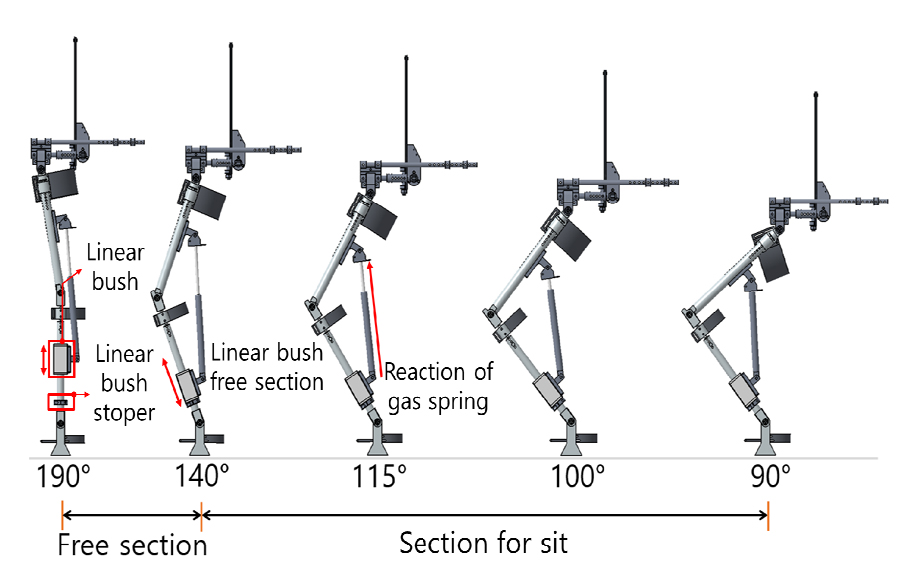
Fig. 1의 개발한 하지 근력 보조 외골격 로봇은 착용자가 앉은 상태일 때 정적 근력을 보조하며 기립하는 동적인 과정에서도 착용자의 근력을 보조한다. Fig. 2에 일어서는 동작에서 가스스프링의 보조력이 작용하는 구간을 나타내었다. 구간별로, 외골격 로봇의 무릎 각도 190°~140° 영역은 착용자가 자유롭게 걸어 다닐 수 있는 자유 구간이다. 이때는 리니어 부시가 자유롭게 움직이며, 가스스프링의 힘이 착용자에게 전달되지 않는다. 외골격 로봇의 무릎 각도가 140°~90°에는 착용자가 앉을 수 있는 구간으로 가스스프링의 반발력이 착용자를 지지해주는 구간이다. 이때는 리니어 부시가 스토퍼에 의해 멈추게 되며 가스스프링의 힘이 착용자에게 전달된다. 앉을 수 있는 구간(140°~90°)에서는 가스스프링의 릴리스 레버를 사용하여 의자의 높낮이를 조정하는 방식으로 가스스프링을 고정 할 수 있다. 따라서 개발한 하지 근력 외골격 로봇은 작업자가 중량물을 인양하는 등의 동적 과정에서는 가스스프링의 잠금 기능을 사용하지 않고 가스스프링의 반발력을 이용하여 착용자에게 보조력을 제공하게 되며, 앉는 자세를 유지해야 하는 정적 과정에서는 가스스프링의 잠금 기능을 통해 가스스프링을 고정한 후 착용자가 외골격 로봇에 앉아 보조력을 제공받을 수 있다. 가스스프링은 LOUIE사의 KQL004모델을 사용했으며, 제원은 Table 3에 나타내었다. 착용자가 바닥에 놓인 중량물을 인양하는 동작에서 불편함을 느끼지 않도록 최대 길이 400mm, 스트로크 140mm인 가스스프링으로 선정하였다.
가스스프링을 통해서 앉을 수 있는 기능을 사용하기 위해서는 가스스프링에 필요한 힘에 대한 계산이 필요하다. Fig. 3의 (a)에는 외골격 로봇을 착용한 사람이 앉는 기능을 사용했을 때, 외골격 로봇에 작용하는 하중과 가스스프링의 힘을 나타내었다.
사람의 무게를 70kg이라 가정하고 외골격 로봇의 무게를 더하면 총 83.6kg(약 820N)이 된다. 이 무게는 외골격 로봇을 통해 양쪽 가스스프링에 전달된다. 따라서 외골격 로봇의 한쪽에 작용하는 힘은 약 410N이라고 계산할 수 있다. 이와 관련한 힘 성분을 Fig. 3의 (b)와 같이 나타내었다. Fhuman은 허벅지와 무릎 사이 로봇 링크에 착용자 및 외골격 로봇의 무게가 작용하는 힘, Fgas는 착용자와 외골격 로봇의 무게를 버티기 위해 가스스프링에 필요한 잠금 힘, Fknee는 외골격 로봇의 무릎 조인트에서 착용자 및 외골격 로봇의 균형을 잡기 위해 착용자에게 요구되는 힘이다.
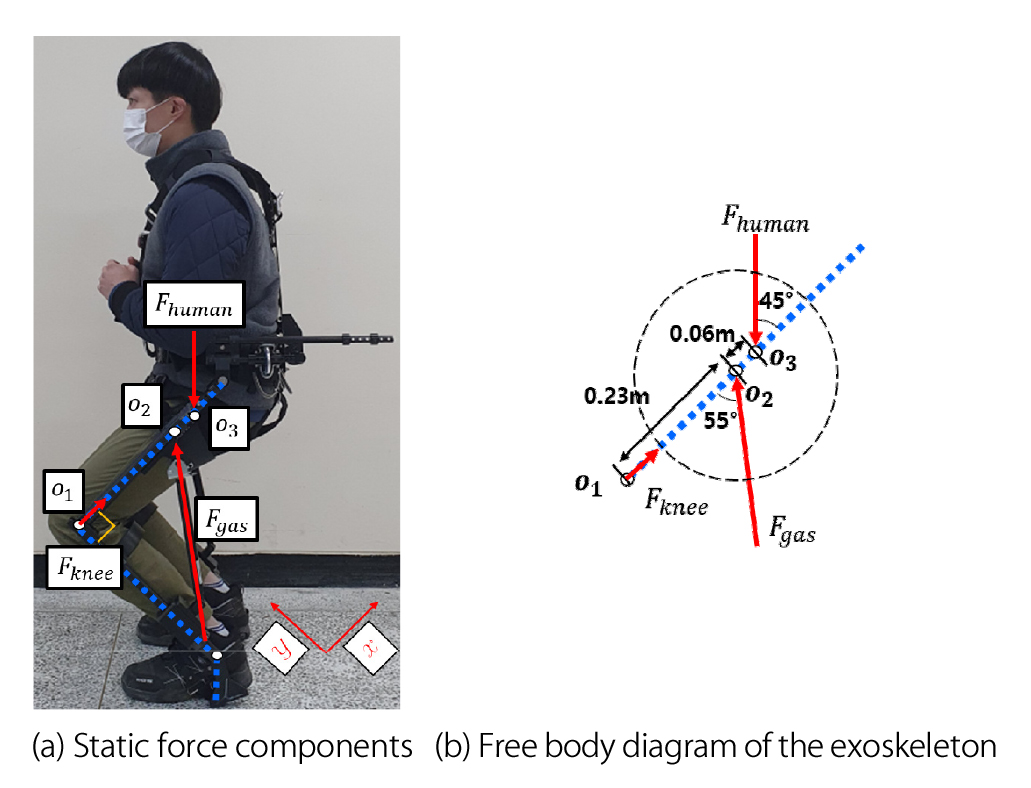
착용자가 앉는 기능을 사용했을 때, 가스스프링에 필요한 잠금 힘을 계산해 보았다. Fig. 3의 (b)에서 x방향의 합력을 Equation (1), O1점에서의 모멘트 합을 Equation (2)에 나타내었다. Fhuman=410N으로 가정하고 Equation (1), (2)를 연립하면 Fgas=446N의 결과를 도출할 수 있다. 따라서 가스스프링의 잠금 힘은 446N이 필요하며, 사용한 가스스프링의 잠금 허용 하중은 2,500N으로, 안전율 5 이상을 만족하는 것을 확인할 수 있다. 또한 앉았다가 일어서는 과정에서 가스스프링의 잠금을 풀면서 Table 3의 가스스프링 사양에 나와있는 250N의 팽창압력이 작용되며 기립동작에서 착용자의 하지 근력을 동적으로 보조한다.
Table 3.
Gas spring specifications
| Description | Value |
| Maximum length | 400mm |
| Stroke | 140mm |
| Inflation pressure | 250N |
| Locking force | 2,500N |
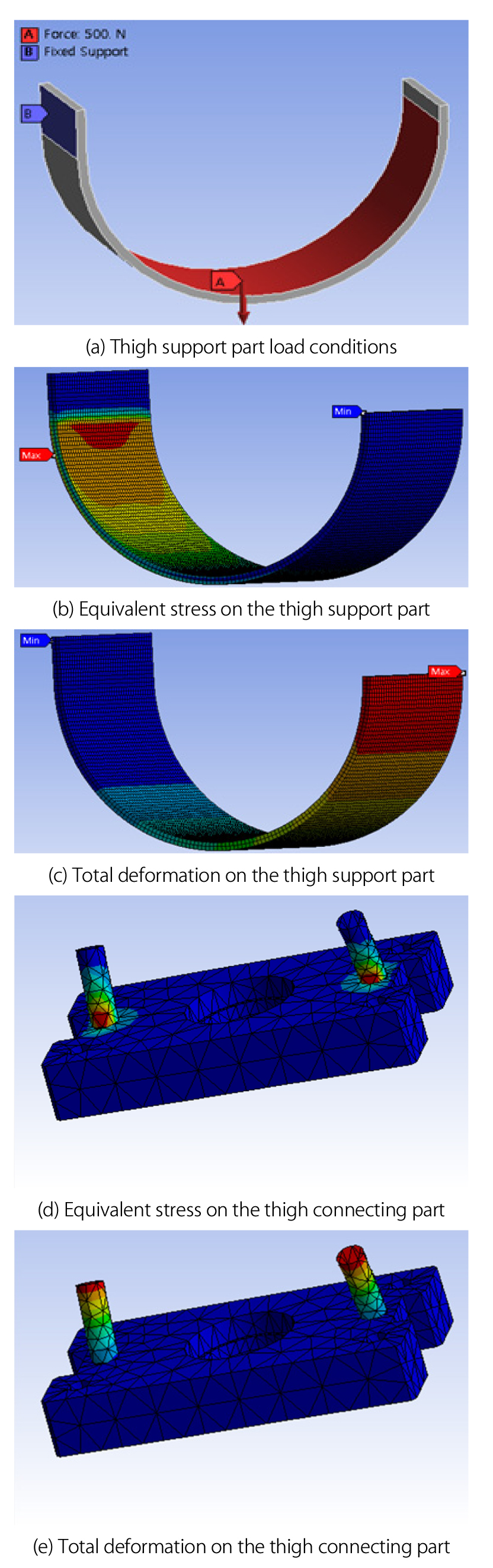
이번에는 외골격 로봇의 앉는 기능을 사용했을 때, 사람의 하중을 지지해주는 허벅지 지지부 및 허벅지 지지부와 로봇의 링크에 결합 시 사용되는 체결 부품에 작용하는 힘을 계산하여 그에 대한 구조해석을 통해 파손의 우려가 없는지 확인하고, 허벅지 지지부의 단면적과 두께를 선정하였다. Fig. 4를 보면 외골격 로봇의 착용자가 앉는 기능을 사용했을 때, 허벅지 지지부 위에 앉아 있는 모습을 확인할 수 있다. 허벅지 지지부는 편심을 받는 구조라 변형 및 파손에 취약하다. 그렇기에 구조해석을 통해 최적의 허벅지 지지부의 단면적을 선정하였다.

Fig. 5의 (a)와 같이 ANSYS에서 허벅지 지지부품에 하중 조건을 주었다. 그림의 빨간 부분(A)에 사람의 허벅지가 닿게 되므로 가혹한 환경을 가정하여 한쪽당 500N 하중을 가정하였다. 그리고 파란색 부분(B)은 외골격 로봇에 고정부로 설정하고 해석을 진행하였다. 허벅지 지지부의 소재는 경량화를 위해 알루미늄 소재인 AL5052-H32(항복 응력 : 195MPa)으로 해석을 진행하였고, 그 결과값을 Table 4와 Fig. 5의 (b), (c)에 나타내었다.
Table 4.
Stress and strain acting on the thigh support
| Load (N) |
cross-sectional area (mm2) |
Maximum stress (MPa) |
Maximum strain (mm) |
| 500 | 5 x 80 | 155 | 17.08 |
| 6 x 80 | 107 | 9.80 | |
| 7 x 60 | 102 | 8.33 |
허벅지 지지부에서 사람의 하체의 무게를 지지하게 되므로 체결 부품에는 사람의 상체의 무게가 작용하게 된다. 체결 부품은 항복 응력이 250MPa인 소재를 사용하였다. 사람의 상체의 무게를 30kgf(약104N), 60kgf(약 208N), 90kgf(약 312N)으로 가정하고 해석을 진행하였고, 그 결과값을 Table 5와 Fig. 5의 (d), (e)에 나타내었다.
외골격 로봇의 특성상 사람이 착용하는 로봇이기에 경량화를 할 수 있는 부분은 경량화해서 제작하는 것이 유리하고 사람이 허벅지 지지부에서 수 센티미터의 변형은 크게 체감하지 못하기 때문에 허벅지 지지부를 5 × 80mm2의 단면적으로 선정하였다.
3. 하지 근력 보조 외골격의 근 활성도 감소 실험
3.1 실험장비 및 사용 프로그램
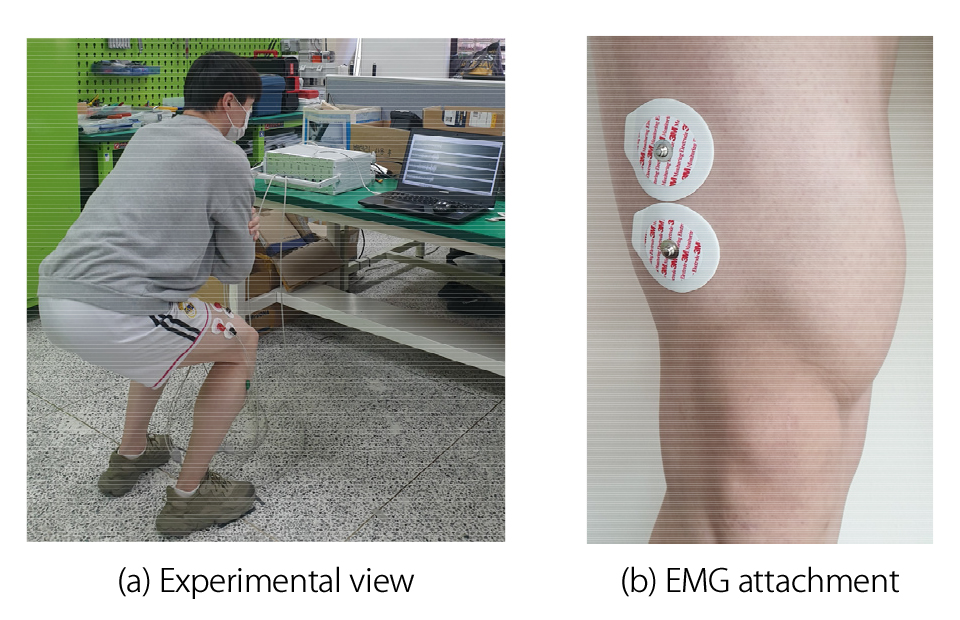
하지 근력 보조 시작품의 성능을 정량적으로 확인하기 위해 본 논문에서는 근전도 분석을 통해 근 활성도를 비교하여 성능을 검증하였다(Kong et al., 2022). 실험 장비는 Fig. 6의 생체 신호 측정 장비 P800, PhysioLab, Korea)를 사용하여 측정하였다. 생체 신호 측정은 Fig. 7의 (b)와 같이 표면 근전도 센서(EMG sensor)를 부착하여 근전도 신호를 측정할 수 있다. 또한 실시간으로 데이터를 측정할 수 있는 P800 측정 장비는 8채널의 데이터를 측정할 수 있으며, 24bit의 분해능과 1~2,000Hz의 샘플링 속도를 가진다. 측정한 근전도 신호는 MATLAB 프로그램을 이용하여 분석하였다.

3.2 실험대상 및 실험과정
본 연구에 참여한 피실험자들은 과거와 현재 하지 근·골격계 질환이 없는 20대 남자 3명을 대상으로 진행했으며, 평균 연령은 26(세)이고, 신장 및 몸무게 평균은 각각 166.3±1.7(cm)와 58.7±1.3(kg)이다. 실험 과정은 정적 실험과 동적 실험으로 나뉜다. 정적 실험은 외골격 로봇의 착용자가 앉는 기능을 사용했을 때, 얼마만큼의 근력 보조 효과가 있는지 확인하기 위한 실험이다.
정적 실험 과정은 피실험자가 외골격 로봇을 착용하고 앉는 기능을 사용한 자세로 1분간 자세를 유지하는 동안 근전도 신호를 취득하는 실험을 진행한다. 이후에 1분을 쉬는 것까지 1세트로 총 3세트의 실험을 진행한다. 그 후에 휴식을 취한 뒤, 정적 실험을 외골격 로봇을 착용하지 않은 채 Fig. 7의 (a)와 같이 진행한다. 이렇게 하지 근력 보조 외골격 로봇을 착용하기 전과 후에 각각 취득한 3세트 데이터를 비교한다.
동적 실험은 하지 근력 보조 외골격 로봇의 기립 동작에서 보조력을 확인하고자 수행하는 실험이다. 동적 실험 과정은 피실험자가 외골격 로봇을 착용한 채로 앉는 기능을 사용하고 5초간 자세를 유지한다. 이후에 보조력을 받으며, 일어서서 5초간 자세를 유지한다. 앞에 10초간의 동작들을 1분간 반복하며 근전도 신호를 측정한다. 이후에 1분을 쉬는 것까지 1세트로 총 3세트의 실험을 진행한다. 그 후에 휴식을 취한 뒤, 동적 실험을 외골격 로봇을 착용하지 않은 채 진행한다. 이렇게 외골격 로봇을 착용하기 전과 후에 각각 취득한 3세트 데이터를 비교하여 외골격 로봇 착용 시 착용 전에 비해 같은 동작을 진행할 때 근 활성도가 줄어드는지 확인한다. 또한 정적 실험과 동적 실험 중 외골격 로봇 착용 시 근 활성도가 더 많이 줄어드는 실험 과정은 무엇인지 확인한다. 실험 시, 근전도 센서의 부착 위치는 허벅지의 바깥쪽 넓은 근(Vastus lateralis)에 부착한 채 실험을 진행하였다(Boschmann et al., 2011).
3.3 근 활성도 분석 실험 결과
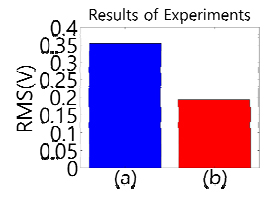
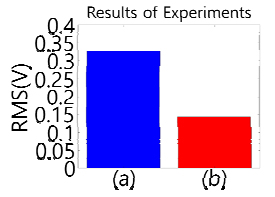
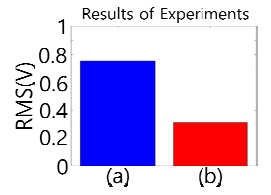
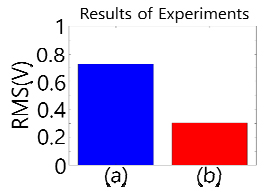
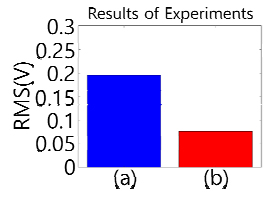
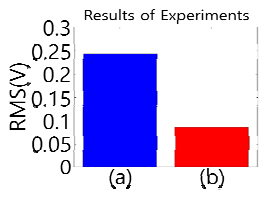
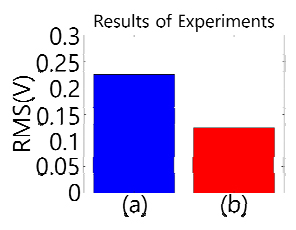
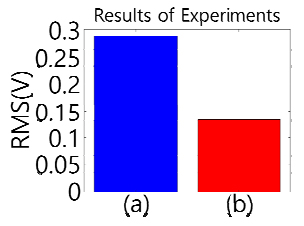
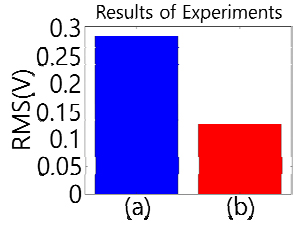
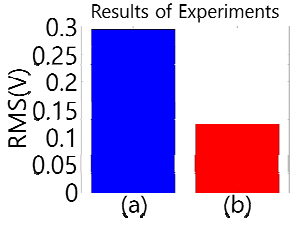
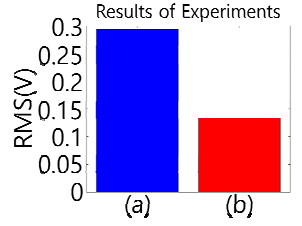
근 활성도 분석의 경우 일반적으로 근전도 원 신호를 RMS(Root Mean Square) 처리하여 근육이 얼마나 큰 힘을 내고 있는지 정량적으로 확인할 수 있다. Table 6에는 정적 실험을 통해 취득한 근전도 신호를 RMS 처리하여 구한 근 활성도 값을 나타내었다. 정적 실험은 앞서 설명한 실험 방식대로 3명의 피실험자가 외골격 로봇을 입기 전, 후에 각각 3세트의 실험을 진행했다. 하지 근력 보조 외골격 로봇을 착용하기 전의 근 활성도 값을 파란색(a)으로, 하지 근력 보조 외골격 로봇을 착용한 후의 근 활성도 값을 빨간색(b)으로 나타내었다. 세트별로 알 수 있듯이 근 활성도의 크기가 외골격 로봇을 착용했을 때, 더 작은 것을 확인할 수 있다. 이는 외골격 로봇을 착용하면, 같은 동작을 취하는데 힘의 덜 들어간다는 것을 의미한다. 그리고 근 활성도 값을 수치화해서 Table 7에 나타내었다. 정적 실험의 경우 하지 근력 보조 외골격 로봇을 착용한 경우 착용하기 전보다 근 활성도가 평균적으로 55.4%(피실험자 3명의 평균) 정도 작게 나오는 것을 확인할 수 있다.
Table 6.
Static experimental results
 |  |  |
| Subject 1, 1set | Subject 1, 2set | Subject 1, 3set |
 |  |  |
| Subject 2, 1set | Subject 2, 2set | Subject 2, 3set |
 |  |  |
| Subject 3, 1set | Subject 3, 2set | Subject 3, 3set |
Table 7.
Static experimental results
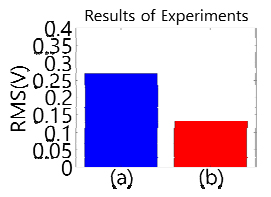
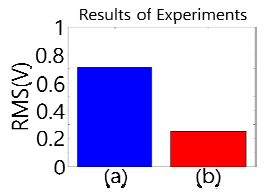
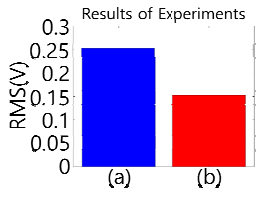
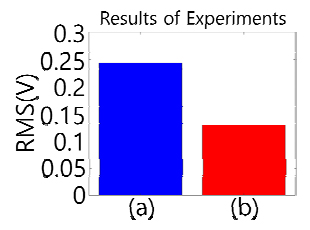
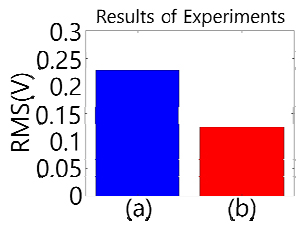
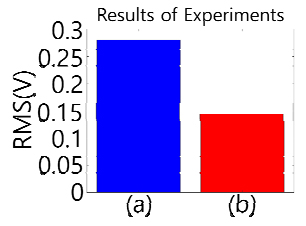
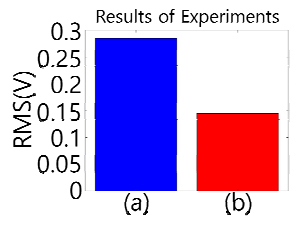
Table 8에는 동적 실험을 통해 취득한 근전도 신호의 RMS 처리를 통해 구해낸 근 활성도 값을 나타내었다. 동적 실험은 앞서 설명한 실험 방식대로 3명의 피실험자가 외골격 로봇을 입기 전, 후에 각각 3세트의 실험을 진행했다. 하지 근력 보조 외골격 로봇을 착용하기 전의 근 활성도 값을 파란색(a)으로, 하지 근력 보조 외골격 로봇을 착용한 상태의 근 활성도 값을 빨간색(b)으로 나타내었다. 세트별로 알 수 있듯이 근 활성도의 크기가 하지 근력 보조 외골격 로봇을 착용했을 때, 더 작은 것을 확인할 수 있다. 이는 하지 근력 보조 외골격 로봇을 착용하면, 같은 동작을 취하는데 힘의 덜 들어간다는 것을 의미한다. 그리고 근 활성도 값을 수치화해서 Table 9에 나타내었다. 하지 근력 보조 외골격 로봇을 착용한 경우 착용하기 전보다 근 활성도가 평균적으로 50.7%(피실험자 3명의 평균) 정도 작게 나오는 것을 확인할 수 있다. 이렇게 정적 실험과 동적 실험 결과를 통해 외골격 로봇을 착용한 후, 같은 동작을 취하는데 들어가는 힘의 크기가 절반 이상 줄어들었다는 것과 정적 과정의 근력 보조 효과가 동적 과정의 근력 보조 효과보다 크다는 것을 확인할 수 있다.
Table 8.
Dynamic experimental results
 |  |  |
| Subject 1, 1set | Subject 1, 2set | Subject 1, 3set |
 |  |  |
| Subject 2, 1set | Subject 2, 2set | Subject 2, 3set |
 |  |  |
| Subject 3, 1set | Subject 3, 2set | Subject 3, 3set |
Table 9.
Dynamic experimental results
4. 결 론
본 연구에서는 정적/동적 근력 보조가 가능한 하지 근력 보조 외골격 로봇을 개발하였다. 기존에 개발된 하지 근력 보조 외골격 로봇의 경우 정적인 근력 보조인 앉을 수 있는 기능만을 제공했었다. 따라서 기존의 하지 근력 보조 외골격 로봇은 앉은 기능을 사용한 뒤, 일어서는 동작에서 외골격 로봇의 무게를 사람이 모두 짊어져야 한다는 문제점이 있었다. 본 연구에서 개발한 하지 근력 보조 외골격 로봇은 정적 근력 보조인 앉을 수 있는 기능이 있다. 또한, 동적 근력 보조로 앉은 기능을 사용한 이후에 일어서는 기립 동작에서 일정 구간 동안 가스스프링을 이용한 보조력을 제공한다. 개발한 하지 근력 보조 외골격 로봇의 기능을 정량적으로 검증하기 위해서 근전도 검사를 진행하였다. 실험은 두 가지로 진행되었으며, 하지 근력 보조 외골격 로봇의 앉을 수 있는 기능에 대해서는 정적 실험을 진행했고, 기립 동작에서 보조력을 제공하는 기능에 대해서는 동적 실험을 진행했다. 근전도 검사로 측정한 데이터를 분석해 보니, 정적 실험은 외골격 로봇을 착용한 이후에 근육에 들어가는 힘의 크기가 55.4% 정도 줄어든 것을 확인할 수 있었다. 동적 실험도 외골격 로봇을 착용한 이후에 근육에 들어가는 힘의 크기가 50.7% 정도 줄어든 것을 확인할 수 있었다. 이를 통해서 개발한 하지 근력 보조 외골격 로봇이 하지 근력 보조에 정량적으로 효과가 있음을 확인하였다. 추후에 경량화와 착용성을 더욱 향상시킨다면 상용화도 가능할 것으로 판단된다.
