

1. 서 론
2. 관련 연구
2.1 기존 거리 및 방향 측정 기술
2.2 충돌 방지 시스템의 방향 정보 활용
2.3 비동기식 거리 및 방향 측정 기술
3. 제안하는 시스템
3.1 시스템 구성
3.2 시스템 동작 원리
4. 성능 평가
5. 결 론
1. 서 론
최근 UWB(Ultra-Wideband) 기술은 객체 간의 거리 측정을 위한 주요 기술로 자리 잡고 있다. UWB의 높은 정밀도와 신뢰성은 산업 현장과 같은 복잡한 환경에서 특히 유용하며, 이를 활용한 산업현장 내에서 AGV(Automated Guided Vehicle)나 AMR (Autonomous Mobile Robot)과 작업자 간의 충돌 방지라든지 스마트 건설현장 내에서 자율작업 중인 건설장비나 자율주행 중인 차량과 작업자 간의 다양한 충돌 방지 시스템 또한 개발되고 있다. 이러한 시스템들은 객체 간의 상대적 거리를 측정하여 위험 요소를 사전에 파악하고 충돌 사고를 예방하는 데 기여하고 있다. 그러나 현재 대부분의 시스템은 객체 간 거리만을 측정하는 데 초점이 맞춰져 있어, 위험 요소의 방향 정보를 파악하지 못한 상태에서 오경보(False Alarm)를 발생시키는 경우가 빈번하다. 이는 효율적인 경고 체계 구축을 어렵게 만들며, 시스템 신뢰성 저하로 이어진다.
충돌 방지와 같은 응용 분야에서 방향 정보는 거리 정보만큼 중요한 요소이다. 이를 위해 일반적으로 TDoA(Time Difference of Arrival)와 ToA(Time of Arrival) 방식이 활용된다. TDoA는 복수의 앵커 간 신호 도달 시간 차이를 이용해 객체의 위치를 추정하며, 단일 신호 송신으로 위치를 계산할 수 있는 효율성을 제공한다. 그러나 앵커 간 시간 동기화가 필수적이라는 한계가 존재한다. 반면, ToA 방식은 앵커 간 동기화 없이도 위치를 추정할 수 있으나, 태그와 다수의 앵커 간 SDS-TWR(Symmetric Double-Sided Two-Way Ranging) 핸드셰이킹 과정을 반복 수행해야 하므로 시간적 비용이 증가한다.
본 논문은 기존 방식의 단점을 보완하기 위해, 태그와 메인 앵커 간 단일 SDS-TWR 과정을 수행하는 동안 보조 앵커들이 오버히어링(Overhearing)을 통해 신호를 수신하고 이를 분석하여 태그와의 거리를 추정하는 새로운 방식을 제안한다. 오버히어링 방식은 앵커와 태그 간 P2P(Point-to-Point) 방식으로 통신하던 것을 말 그대로 나머지 앵커와 태그가 엿듣는 방식을 말한다. 제안된 방식은 복잡한 동기화나 핸드셰이킹 과정을 최소화하면서도 신뢰성 있는 거리 및 방향 정보를 제공한다.
2. 관련 연구
최근 UWB 기술은 높은 정밀도와 짧은 응답 시간을 제공하며, 객체 간 거리 측정 및 위치 추적에 널리 활용되고 있다. UWB 기반 시스템은 일반적으로 ToA(Time of Arrival) 또는 TDoA(Time Difference of Arrival)를 활용하여 객체의 위치를 측정한다. TDoA는 복수의 앵커 간 신호 도달 시간 차이를 기반으로 객체의 위치를 계산하며, 높은 정밀도를 제공하지만, 앵커 간 시간 동기화가 필수적이며 시스템의 설치 및 운영 복잡성이 증가하는 한계가 있다.
2.1 기존 거리 및 방향 측정 기술
UWB 기술을 활용한 거리 및 방향 측정 시스템은 주로 ToA 또는 TDoA 방식을 채택한다. ToA 방식은 태그와 앵커 간 핸드셰이킹을 통해 거리를 측정하며 삼변측위(trilateration) 기법으로 위치를 추정한다. 그러나, 태그와 다수의 앵커 간 SDS-TWR을 반복 수행해야 하므로 시간적 비용이 크다. 반면, TDoA 방식은 한 번의 신호 송신으로 위치를 계산할 수 있는 장점이 있지만, 모든 앵커가 시간적으로 동기화되어야 하므로 추가적인 동기화 장치가 필요하다. 이로 인해 시스템 복잡성과 구현 비용이 증가한다(Yang et al., 2021; Jang, 2022).
2.2 충돌 방지 시스템의 방향 정보 활용
충돌 방지 시스템에서는 객체 간 거리뿐 아니라 방향 정보를 제공하여 위험 요소를 보다 정확히 식별할 필요가 있다. 기존 연구 Alarifi et al.(2016)에서는 TDoA 기반의 방향 측정 시스템을 활용하여 정밀도를 높였으나, 동기화 요구로 인해 높은 구현 비용과 복잡성이 발생하였다. Kim et al.(2019)는 다중 객체 간 상호작용 분석을 위해 방향 정보를 통합한 시스템을 제안했으나, 다수의 앵커가 필요하다는 점에서 제약이 있었다.
2.3 비동기식 거리 및 방향 측정 기술
비동기식 방식은 시간 동기화 없이 거리와 방향 정보를 측정할 수 있는 방법으로, 시스템의 설치 및 운영 복잡성을 줄이는 데 중점을 둔다. Xiong et al.(2018)는 ToA와 RSSI(Received Signal Strength Indicator)를 결합한 비동기식 접근법을 제안하였으나, 방향 정밀도가 낮은 한계를 가졌다. 반면 Zhao et al.(2022)에서는 비동기식 UWB 통신을 활용하여 다중 앵커 환경에서 안정적인 거리 측정을 구현하였으며, 시간 동기화 없이도 효율적인 성능을 입증하였다.
3. 제안하는 시스템
본 논문에서는 태그와 메인 앵커간의 SDS-TWR 프로토콜의 패킷 교환을 보조 앵커가 오버히어링(Overhearing) 방식을 활용하여 SDS-TWR 패킷을 수신하고 분석함으로써, 태그와 보조 앵커 간의 거리를 직접적인 패킷 교환 없이 추정한다. 이를 통해, 기존 방식의 시간적 비용과 복잡성을 대폭 감소시키면서도 신뢰성 있는 거리 및 방향 정보를 제공한다. 이 논문에서는 보조 앵커가 오버히어링한 패킷들의 수신시간과 메인 앵커의 패킷 수신 시간 사이의 상대적 시간 차이를 계산하기 위해 각 앵커간의 동기 방식과 비동기식 방식 두 가지를 제안한다.
3.1 시스템 구성
제안된 시스템은 다음의 주요 요소로 구성된다:
• 태그(Tag): 이동 객체에 부착되며, 메인 앵커와 SDS-TWR 프로토콜을 수행하여 거리 및 방향 정보를 추정하기 위한 신호를 송신한다.
• 메인 앵커(Main Anchor): 태그와 직접적으로 SDS-TWR 신호를 교환하며, 보조 앵커로부터 수집한 데이터를 통합하여 태그의 거리 및 방향 정보를 계산한다.
• 보조 앵커(Auxiliary Anchors): 메인 앵커와의 직접적인 신호 교환 없이, SDS-TWR 과정에서 발생한 패킷을 오버히어링하여 태그와의 거리를 간접적으로 추정한다.
Fig. 1은 메인 앵커와 보조 앵커의 배치 예제를 나타낸다. 메인 앵커와 보조 앵커는 태그의 거리와 각도를 측정하기 위해 대상 객체에 설치되며, 측정 대상의 중심을 (0,0)으로 설정한 좌표계를 기준으로 미리 정해진 위치에 배치된다.
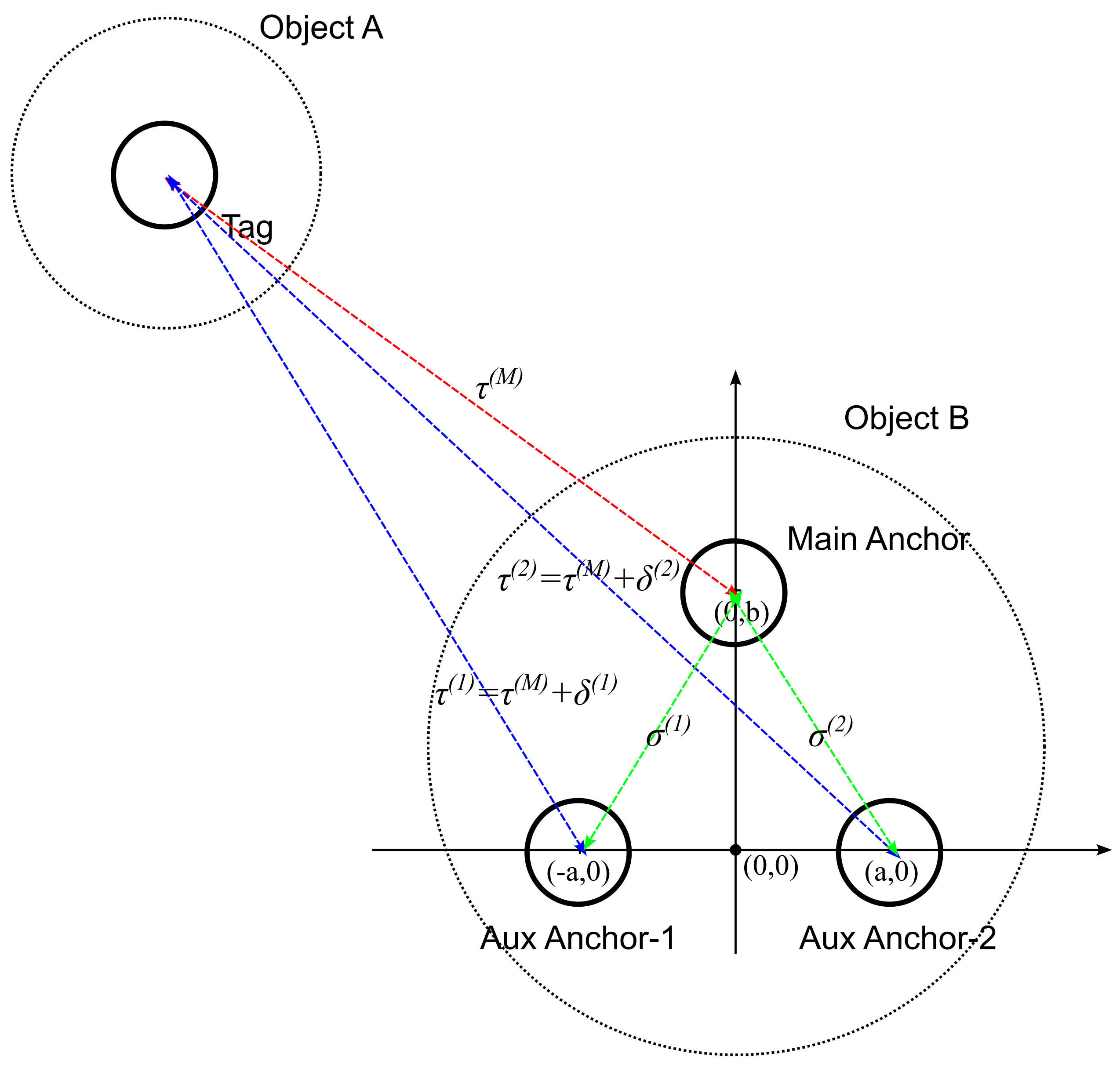
본 논문에서는 각 앵커 간의 좌표는 미리 차량 또는 장비에 고정되어 설치되는 것으로서 사전에 설정되어 있다고 가정하며, 이러한 좌표 설정이 시스템 성능에 미치는 영향은 논의하지 않았다.
3.2 시스템 동작 원리
시스템은 다음과 같은 세 가지 주요 단계로 작동한다.
Fig. 2는 오버히어링을 이용한 SDS-TWR의 패킷 교환 과정을 나타낸 도식이다.
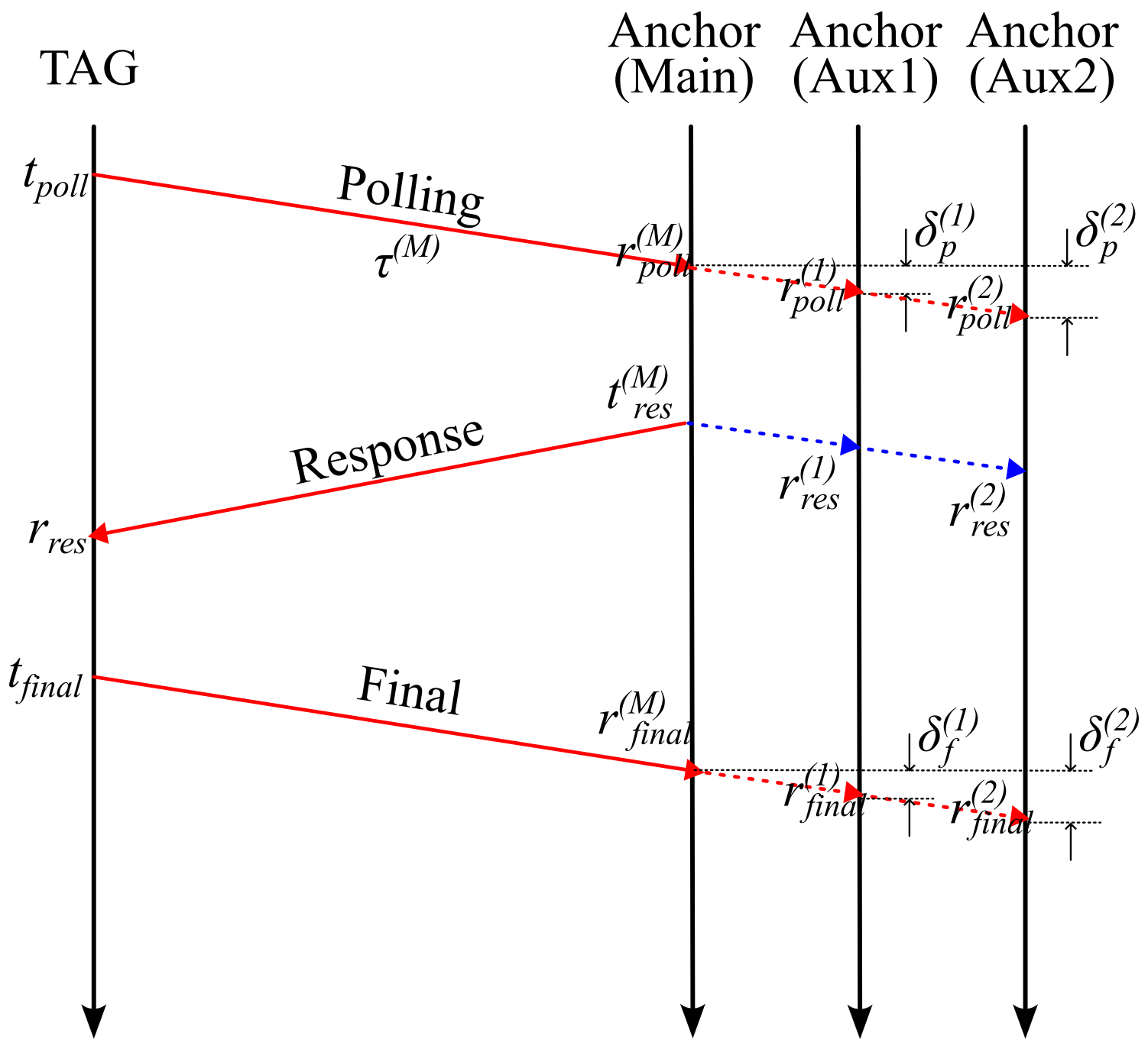
A. SDS-TWR 수행 및 데이터 수집:
태그는 메인 앵커와 SDS-TWR 프로토콜을 사용하여 전파 도달 시간 을 계산한다. 이때, 태그는 폴링(Polling)을 송신하며, 메인 앵커는 이를 수신한 뒤 응답(Response) 신호를 회신하고, 태그는 다시 최종(Final) 신호를 앵커로 송신한다. 이 과정에서 보조 앵커는 태그와 메인 앵커 간의 신호를 오버히어링하여 해당 패킷의 도달 시간 ,,,,,을 기록한다.
B. 시간 차이 계산 및 거리 추정:
메인 앵커는 수집된 데이터를 기반으로 태그와 보조 앵커 간의 거리 추정을 수행한다. 이때, 사전에 공유된 메인 앵커와 보조 앵커의 설치 좌표 정보에 따라 메인 앵커의 응답 패킷이 각 보조 앵커에 도착하는 시간은 상수 , 이므로, 메인 앵커가 응답 패킷을 송신한 시간에서 이를 차감하여 각 보조 앵커들과의 시간을 동기화 시킬 수 있다. 이를 위해 두 가지 방식이 사용된다.
• 동기식 방식 : 동기식 방식에서는 모든 메인 및 보조 앵커들이 시간 동기화 되어있다고 가정한다. 시간 동기화는 유선 혹은 별도의 통신 채널을 통해 구현될 수 있으며 메인 앵커와 동기화 된 상태에서는 보조 앵커가 수신한 각 패킷의 시간과 메인 앵커가 수신한 각 패킷의 수신시간의 차를 통해 태그와의 상대적 시간차를 직접적으로 계산할 수 있다.
• 비동기식 방식 : 동기식 방식은 각 보조 앵커간의 패킷 수신 시간의 차이를 직접적인 거리차이로 계산될 수 있는 장점이 있으나 시간 동기를 위한 비용이 상승된다. 이를 위해 본 논문에서는 메인 앵커가 태그에게 회신한 응답(Response)신호를 보조 앵커들이 수신한 시간 , 을 기준으로 각 폴링 및 최종 패킷의 수신 시간을 다음과 같이 메인 앵커 기준으로 재배치 한다.
for
위의 식에서 메인 앵커와 보조 앵커 간의 패킷의 수신 시간 차 ,,,의 평균으로 각 보조 앵커들의 수신 시간차를 계산한다.
C. 위치 및 방향 정보 통합:
메인 앵커는 상기에서 계산된 태그와 메인 앵커, 보조 앵커간의 전파 도달 시간 정보를 사용하여 삼변측위(trilateration) 기법을 통해 태그의 위치를 계산한다. 이를 위해 보조 앵커들이 기록한 시간 차이 데이터를 활용하여 태그와의 거리와 방향 정보를 추정하며, 최종적으로 태그의 상대적 위치를 도출한다.
4. 성능 평가
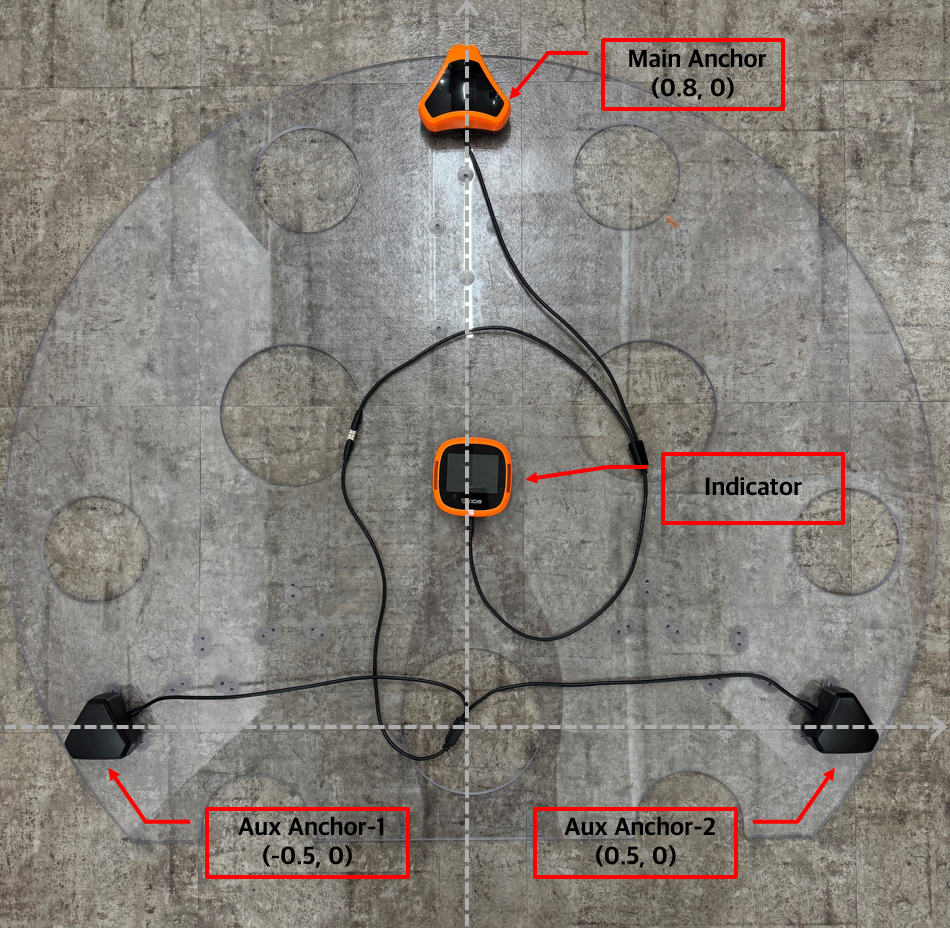
메인 앵커와 태그간의 SDS-TWR 프로토콜의 패킷 교환을 보조 앵커가 오버히어링(Overhearing) 방식을 활용하여 수신하고 분석하여 태그와 보조 앵커 간의 거리를 직접적인 패킷 교환 없이 추정하도록 구현하였고 Fig. 3과 같이 메인 앵커와 보조 앵커-1, 보조 앵커-2를 배치하고 중앙에는 동작상태를 모니터링 할 수 있는 인디케이터(Indicator)를 설치하여 평가하였다.
이동 객체에 태그(Tag)를 부착하고 임의의 거리에서 0°, 30°, 60°, 90° 방향으로 이동하면서 100회 이상 측정하여 데이터를 수집하였다. 그 결과로 측정된 2차원 평면 좌표를 Fig. 4와 같이 표시하였다.
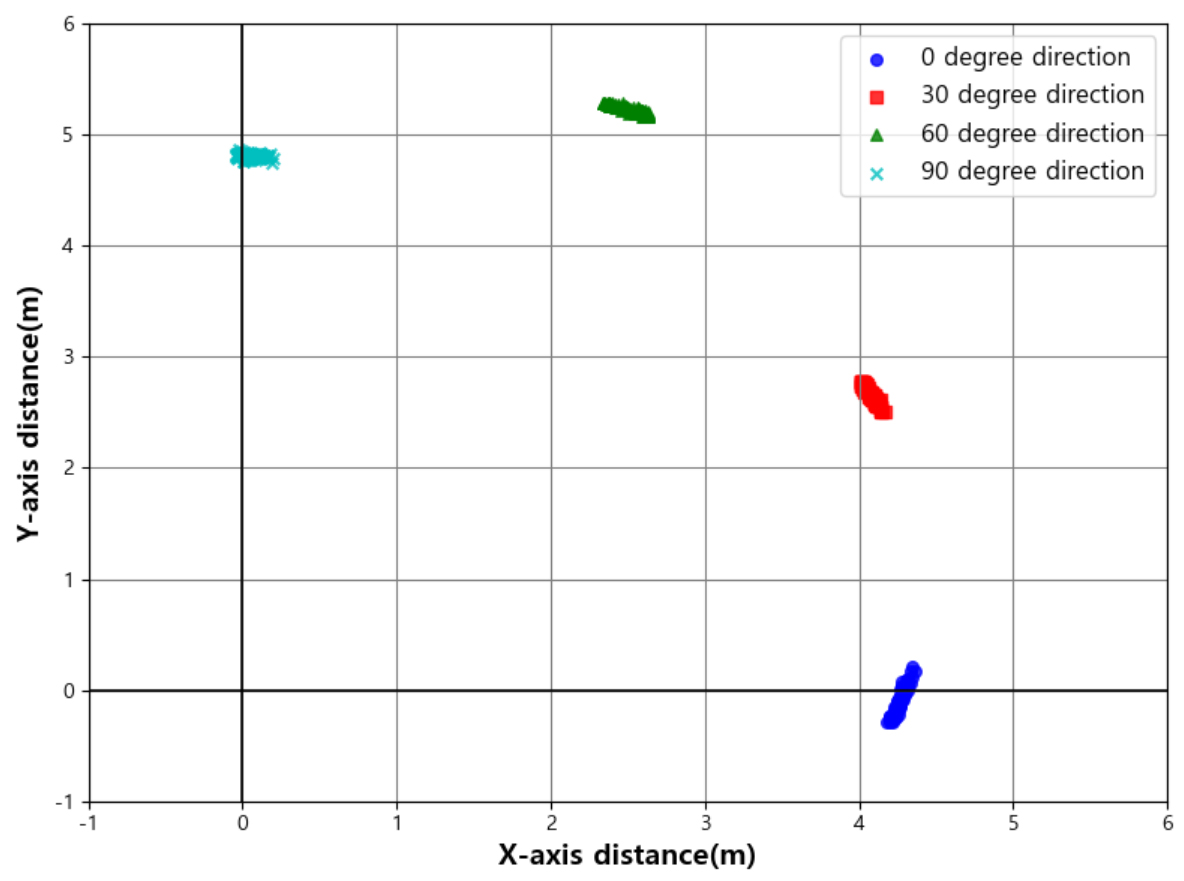
본 성능 평가를 통해 제안된 기법이 기존 방식의 시간적 비용과 복잡성을 대폭 감소시키면서도 신뢰성 있는 거리 및 방향 정보 제공이 가능함을 확인하였다.
또한 Fig. 4에서 가장 측정 분포가 크게 보이는 0° 방향 100개의 데이터를 자세히 확인하기 위하여 Fig. 5와 같이 극좌표계(Polar Coordinate)로 표현하고 정확도(Accuracy)와 정밀도(Precision)를 확인하였다. 정확도의 계산은 줄자로 측정된 기준점(4.3m, 0m)을 기준으로 유클리드 거리(Euclidean Distance)를 계산하여 평균 오차(Mean Error)를 계산하였고 정밀도는 표준 편차(Standard Deviation)를 계산하였다.
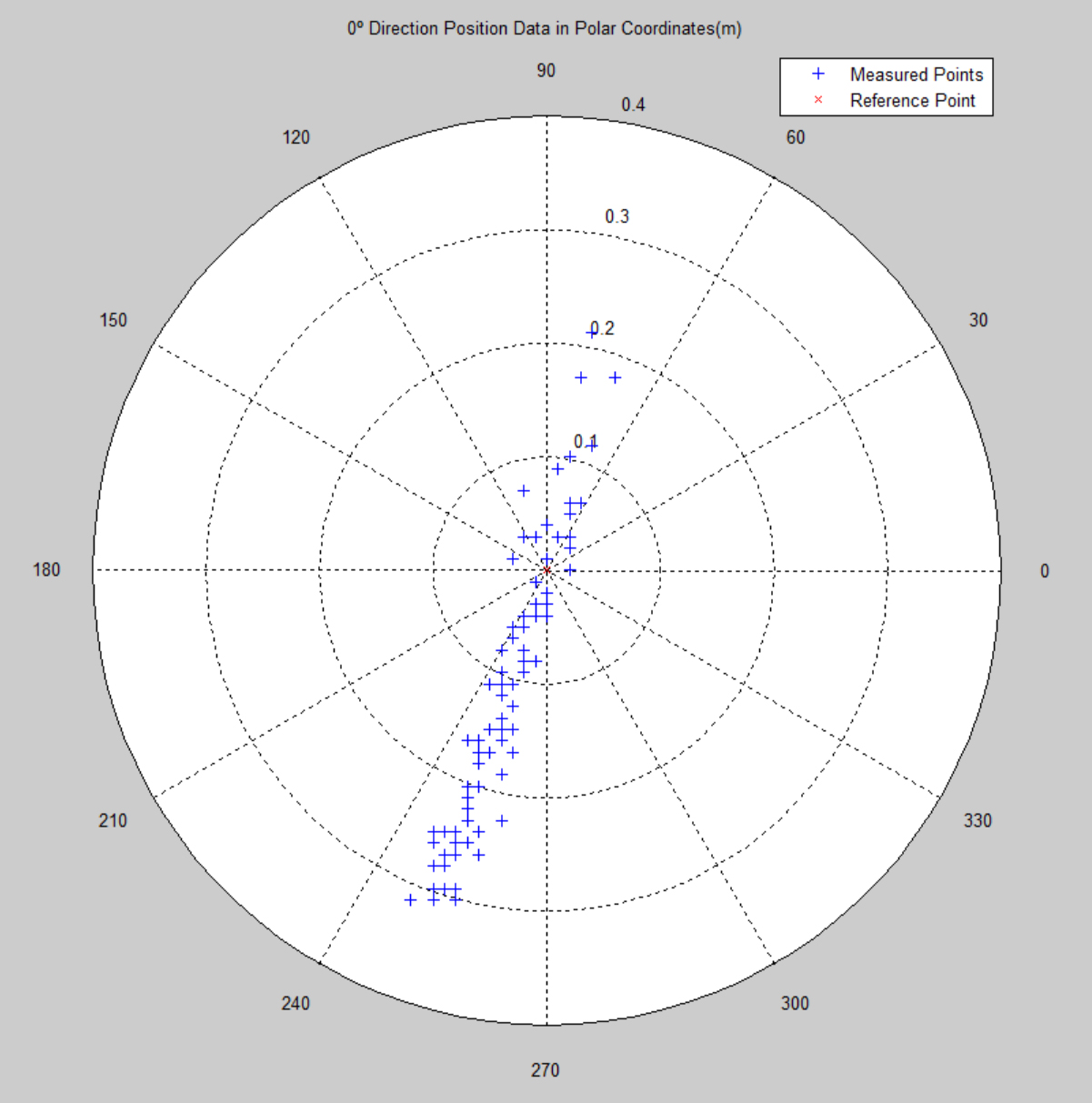
그 결과 0° 방향 100개의 데이터에 대한 정확도는 13.9cm 이내로 확인하였고 정밀도는 약 8.9cm로 확인되었다.
5. 결 론
본 논문에서는 UWB 기반 위치 추정 시스템에서 SDS-TWR 패킷 교환과 오버히어링(Overhearing)을 활용하여 효율적으로 태그의 거리와 방향을 측정할 수 있는 새로운 방식을 제안하였다. 기존 TDoA 및 ToA 방식에서 요구되던 복잡한 앵커 간 동기화나 다수의 핸드셰이킹 과정을 대폭 간소화함으로써, 제안된 방식은 설치 및 운영의 효율성을 크게 향상시킨다.
특히 비동기식 방법은 앵커 간 동기화가 전혀 필요하지 않아 시간 동기화를 위한 추가적인 장치나 비용이 필요 없으며, 다양한 환경에서 유연하게 적용할 수 있는 장점을 가진다. 이를 통해 제안된 시스템은 시간적 비용과 구현 복잡성을 줄이면서도 높은 신뢰성을 유지할 수 있다.
향후 연구에서는 실제 환경에서의 구현 및 다양한 응용 사례를 통해 시스템의 성능과 유용성을 검증할 예정이다. 이를 통해 제안된 방식이 스마트 건설을 위한 위치 정보 제공, 건설장비 ‧ 기계의 자율작업 및 자율주행, 건설장비와 장비 간의 충돌, 장비와 작업자 간의 충돌예방 등 건설 안전, 일반 산업환경의 자율 이동 장치, 물류 관리 등 다양한 분야에서 효율적이고 신뢰성 있는 측위 솔루션으로 활용될 수 있을 것으로 기대된다.
