

1. 서 론
2. 시스템 개념
2.1 굴착기 로봇 시스템
2.2 원격 조작 스테이션
3. 시스템 알고리즘
3.1 레버 조작 모듈의 작업 영역 맵핑 알고리즘
3.2 원격 작업을 위한 안전 자세 복귀 알고리즘
4. 원격 굴착 작업 실험 평가 및 결과
5. 결 론
1. 서 론
건설용 굴착기는 토목 및 건축 공사에 쓰이는 중장비 기계로 버켓 외에 집게, 리퍼, 브레이커 등의 어태치먼트를 장착하여 굴착 작업, 도랑 파기, 경사면 작업, 착암 작업, 다짐 작업, 적재 작업 등 다양한 건설 작업에 사용되고 있다. 굴착기는 건설 기계 중 활용 빈도가 높으며, 사망사고 재해 현황 또한 높은 비율을 차지한다(국토교통부 건설산업과, 2022). 건설현장 기계장비 사고율을 줄이고자, 작업자의 안전을 보장하기 위한 건설 중장비의 무인화 및 원격 조종에 대한 연구가 활발히 진행되고 있다.
굴착기 무인화 방법으로는 크게 3가지로 분류된다. 중장비 출고 시, 자체적인 전자 유압 시스템을 적용하는 방법이 있으며, 대표적으로는 BROKK, Husqvarna에서 개발한 무인 파쇄 로봇이 있다. 두번째로는 기존 상용화된 유압 굴착기에 전자 유압 시스템을 개조하는 방식이 있다. Hirabayashi et al.(2006)은 수중에서 굴착 작업을 위한 원격 조종 시스템을 개발하였다. 마지막으로는 상용화된 굴착기에 별도의 조작용 장비 또는 로봇을 적용하는 방법이 있다. Sasaki et al.(2008)은 공압식 로봇 시스템을 굴착기에 장착하여 원격으로 굴착 작업을 검증하였다. 국내에서는 굴착기에 무개조 기반 원격 조종 시스템을 적용하여 Human Robot Excavator Interaction(HRI)기술과 직관적인 조종기를 제안하였으며, 작업물의 파지 및 이송에 대한 작업을 검증하였다(Kim, 2019).
하지만 기존 무개조 기반 원격 조종 시스템은 원격 조종기의 레버 작업 공간과 유압 굴착기 레버의 작업 공간이 상이하기 때문에 작업 효율이 떨어진다는 문제점이 있다.
본 연구에서는 상용화된 굴착기에 간편하게 탈부착할 수 있는 크롤러 타입인 유압 굴착기 레버 모듈과 페달 조작용 모듈을 개발하였으며, 기존 굴착기 무인화 시스템 및 조종기 레버의 작업 공간 맵핑 문제점을 개선하기 위한 레버 조작 모듈 맵핑 알고리즘, 원격 작업을 위한 안전 자세 복귀 알고리즘을 제시하고자 한다.
2. 시스템 개념
2.1 굴착기 로봇 시스템
유압 굴착기는 주행용 하부체(크롤러 타입 또는 휠 타입)와 붐/암/버켓 관절의 링크 구조물과 결합된 상부 회전체로 구성된다. 레버와 페달 조작에 따라 굴착기의 붐/암/버켓/스윙 동작과 주행이 이루어지며, Soqiety of Automotive Engineers(SAE) 표준을 통해 제어하게 된다(Hutter et al., 2016). 왼쪽 레버에서는 암 및 스윙 동작을, 오른쪽 레버에서는 붐 및 버킷을 제어한다. 굴착기의 통상적인 레버 모듈은 좌우 총 4자유도이며, 콘솔, 스와시플레이트, 유니버셜 조인트, 푸시 로드 등으로 구성된다. 페달 조작 모듈은 1자유도로 구성되며, 전/후진으로 동작하게 된다. 조작용 발판과 조작용 발판에 고정되어 있는 핸들, 주행용 밸브로 구성된다.
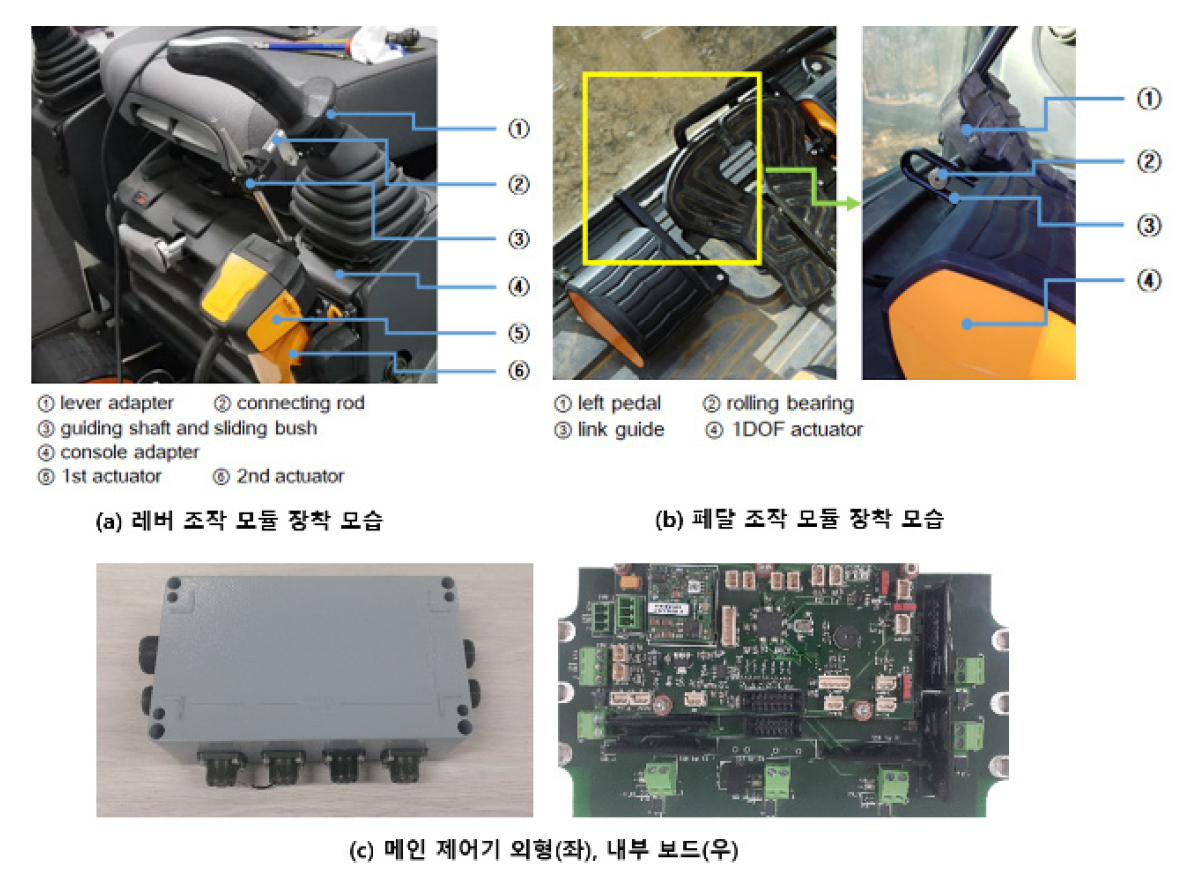
본 연구에서 사용되는 시스템은 Fig. 1과 같이 상용화된 굴착기 로봇 시스템에 레버 조작 모듈, 페달 조작 모듈, 상위 제어기인 메인 제어기 그리고 원격 조종을 위한 조종기로 구성된다.

상기의 굴착기 무인화 시스템에서 통상적인 레버 모듈을 조작하기 위해서는 2자유도로 설계된 레버 조작 모듈의 구동부를 굴착기의 좌우 콘솔에 장착한다. 구동부의 자유도는 분리되어 레버의 좌우 동작은 Fig. 2(a) 의 첫번째 구동부에서, 레버의 전후 동작은 Fig. 2(a) 의 두번째 구동부에서 제어된다. 슬라이드 조인트 구조와 2자유도 회전 조인트 구조를 통해 구동부의 동작을 레버로 전달한다. 페달 조작 모듈은 Fig. 2(b)와 같이 주행용 페달 회전축과 조작용 구동 모터 회전축이 일치하지 않아도 동작을 전달할 수 있도록 링크 가이드와 구름 베어링을 이용하였다. 레버 조작 모듈과 페달 모듈은 굴착기 좌우 레버와 좌우 페달에 각각 설치되며, 총 4개의 모듈을 사용한다. 해당 모듈을 통합 제어하기 위해 Fig. 2(c)과 같이 메인제어기를 설계하였다. 메인 제어기는 시스템 오류 발생 시, 각 모듈별로 전달되는 전원을 차단할 수 있는 기능을 탑재하였으며, 상위 제어기의 명령에 따라 각 모듈의 위치 정보가 전송된다.
2.2 원격 조작 스테이션
일반적인 원격 조종은 휴대용 조종기를 사용하며, 제품의 이송 및 설치가 쉬운 장점이 있다. 하지만 해당 장치는 건설기계 안전기준에 따라 형태가 제한이 된다. 바닥에 떨어질 때, 조종기의 조이스틱은 가드보다 높아서는 안되기 때문에 작업자의 조작감을 낮추게 하여 장시간 작업 하는데 굴착기의 레버를 통한 작업보다 상대적으로 힘이 든다. 또한 시야 확보가 불가능한 경우가 발생하여 작업 공간에 제한이 생긴다.
상기 휴대용 원격 조종기의 문제점을 해결하고 원격 작업 효율을 높이기 위해 굴착기 조종석과 유사한 원격 조작 스테이션을 개발한다. 굴착기에 쓰이는 시트와 콘솔을 사용하며, 굴착기의 유압식 레버와 페달은 전자식 레버와 페달로 대체한다. 작업자에게 작업 공간의 시각 정보를 전달하기 위하여 굴착기에 카메라를 장착하여 전송된 영상을 원격 조작 스테이션 내에 설치되어 있는 모니터를 통해 본다.
3. 시스템 알고리즘
3.1 레버 조작 모듈의 작업 영역 맵핑 알고리즘
굴착기의 작업 동작은 좌우 레버를 통해 붐, 암, 버켓, 그리고 스윙 동작을 복합적으로 수행한다. 이를 제어하기 위해서는 원격 조종기의 조이스틱 위치 값을 메인 제어기에 전달하여, 레버 조작 모듈의 모터 위치를 제어해야 한다.
레버 조작 모듈의 작업 공간은 원격 조종기의 조이스틱 작업 공간과 서로 모양이 다르며, 작동 범위가 더 작다. 이러한 현상의 원인으로는 모터 감속기의 백래쉬와 슬라이드 및 회전 조인트 내 기구물 간의 공차 때문이다. 또한 부품의 사용 환경에 따라 각 조인트에서의 마찰 계수 변화가 생겨 모터의 토크가 부족한 것으로 분석된다. 후자의 문제점을 제외한 백래쉬 및 공차에 대한 문제점을 해결하기 위해, 레버 조작 모듈 및 원격 조종기 조이스틱의 작업 공간을 서로 일치하게 만들어주는 맵핑 알고리즘이 필요하다.
Lee et al.(2015)에서는 레버 조작 모듈의 작업 공간 끝 지점의 경계선을 4개의 꼭지점으로 잡고 중심부 좌우의 끝 점을 2개의 포인트로 잡아 총 6개 점에 대한 위치 데이터를 1차 선형으로 수식화 하였다. 해당 알고리즘은 레버 조작 모듈을 굴착기 레버에 장착한 뒤, 레버를 전후진 작동하였을 때, 가이드 샤프트의 중앙선이 레버 조작 모듈의 중앙선과 불일치 할 수 있다. 이는 맵핑 알고리즘의 작업 공간에 영향을 줄 수 있다.
이러한 영향을 상쇄하고자, 본 연구에서는 레버의 전진 및 후진에 대하여 2개의 특징점을 추가하였으며, 총 8개 기준점을 확보하는 맵핑 알고리즘을 제시하고자 한다.
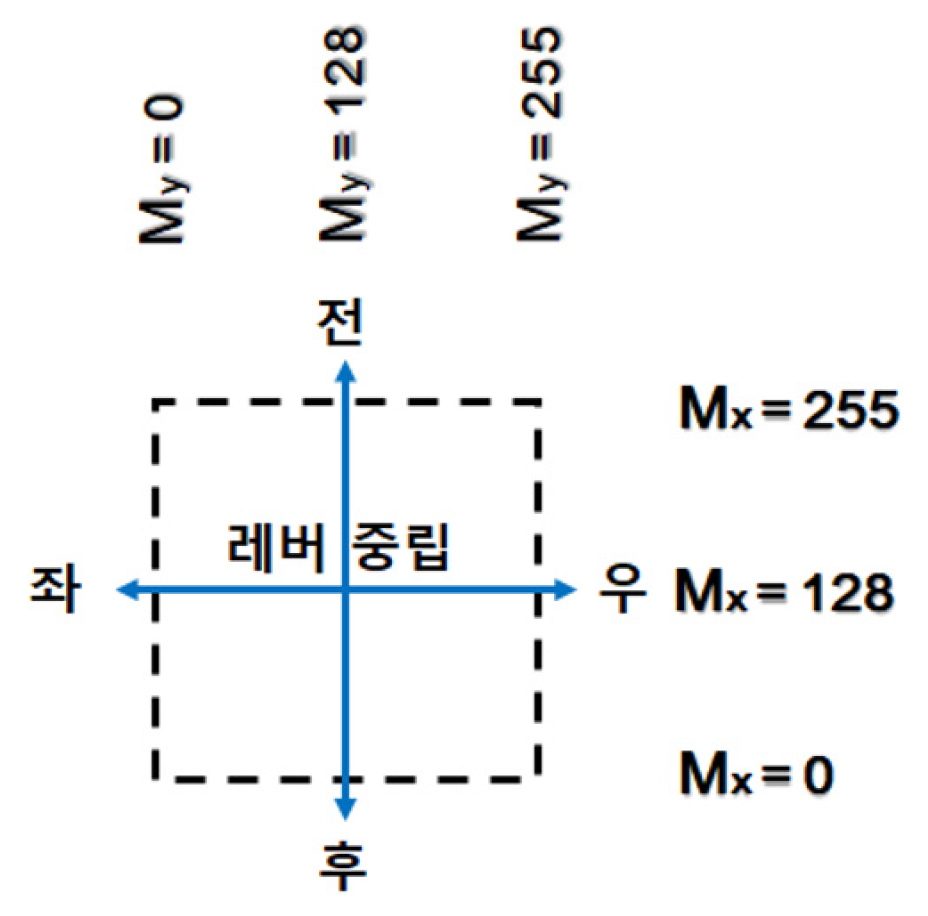
Fig. 3은 굴착기 레버의 조작 영역이며, 레버의 제어 위치는 (Mx, My)로 정의 된다. 1byte 데이터로 0~255의 범위를 가지며, (Mx, My)의 위치 값이 모두129보다 클 경우, 레버를 전진 및 우측으로 이동한다. 8개의 특징점 좌표는 (Pn,x, Pn,y), (n=1,2,...,8)로 표기 되며, 레버의 중앙 위치 (cx, cy)는 원점 (P0,x, P0,y)이라 할 경우, 다음과 같다(Equation 1).
레버 조작 모듈 작업 영역은 Fig. 4과 같으며, 각 경계선은 Equations 2, 3과 같이 계산된다.
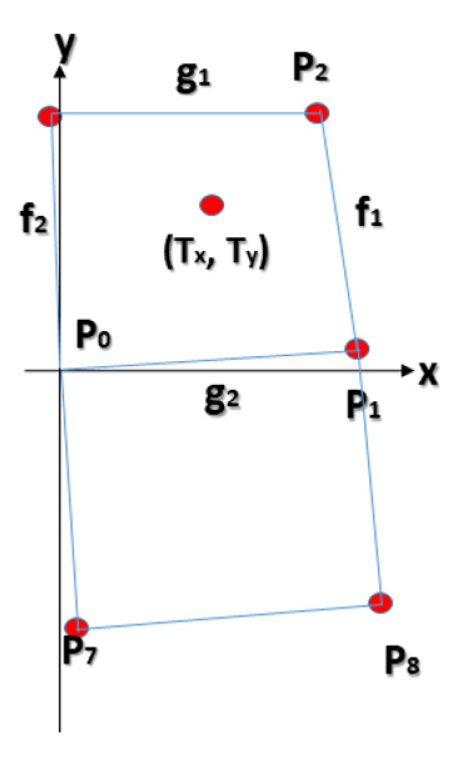
경계선을 계산한 뒤, 현재 위치 값 (Tx, Ty)은 비례식을 통해 계산된다(Equation 4).
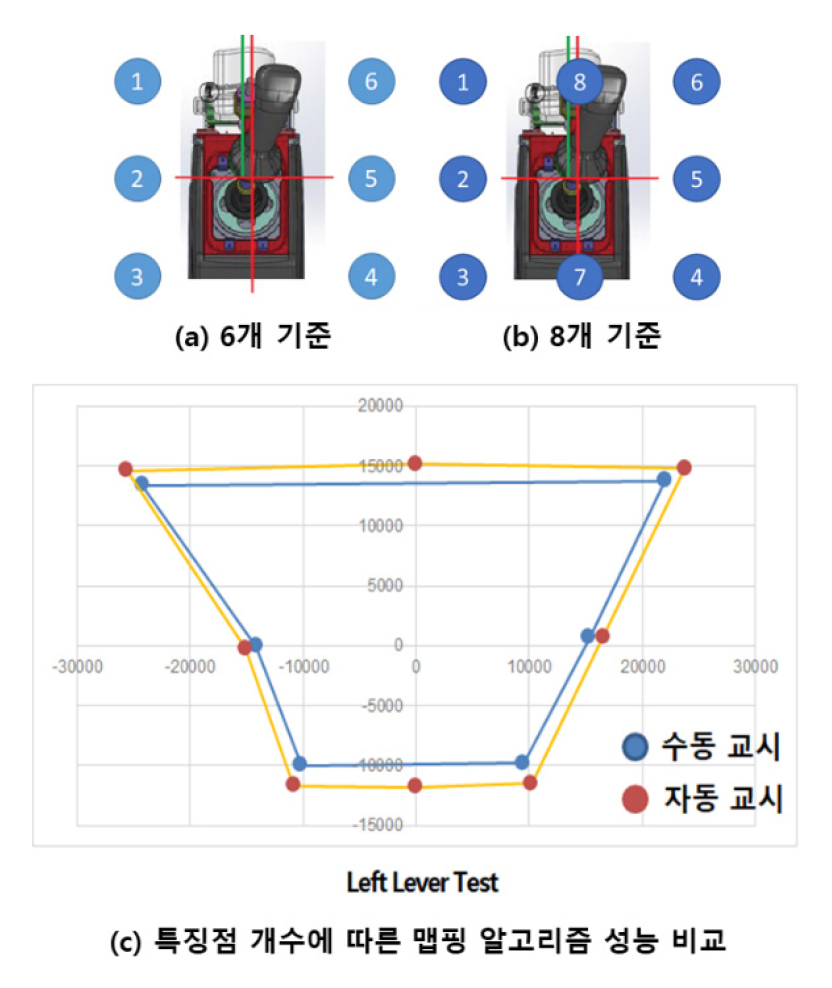
특징점의 개수에 따라 맵핑 알고리즘의 성능을 확인하고자, Fig. 5(a) 과 같이 6개 점을 기준으로 수동 교시 방법을 이용하였으며, Fig. 1(b) 와 같이 8개 점을 기준으로는 자동 교시 방법을 이용하였다. 자동 교시 방법은 레버 조작 모듈 구동 모터의 전류 제어에 의해 모터의 최대 동작 범위를 자동으로 찾는다. 수동 및 자동 교시의 엔코더의 위치 결과는 Table 1과 같다.
Table 1.
Comparison of encoder position values between manual-teaching auto-teaching
Fig. 5(c)을 통해, 특징점 8개 기준 자동 교시 작업 공간이 6개 기준 수동 교시의 작업공간보다 6~17% 향상되었다.
3.2 원격 작업을 위한 안전 자세 복귀 알고리즘
굴착기는 건설의 다양한 환경에서 흔히 쓰이는 중장비로 위험한 지역에서 또한 많이 사용되고 있다. 경사면에서 굴착 작업을 하게 될 경우, 미세한 자세 변화에 따라 전도 및 전복으로 일어날 수 있다. 일반적인 원격 조종기를 이용한 굴착 작업은 카메라가 전송하는 화면에 의존하기 때문에 시야가 확보가 안되는 작업 영역에서는 작업을 진행할 수 없게 되며, 굴착기의 자세 및 출력에 따른 부하를 예측할 수 없게 되어 전복 사고가 일어날 확률이 높다. 본 연구에서는 이러한 안전 사고 발생 확률을 낮추고자 Xsens사 Mti-3 Inertial Measurement Unit(IMU) 센서를 굴착기 하단부에 고정 시켰으며, Roll, Pitch를 사용하여 굴착기의 무게 중심을 계산한 뒤, 자세 불안정 시 굴착기를 안전한 자세로 복귀해주는 알고리즘을 제시하고자 한다.
원격 조종을 이용한 굴착기 무인화 시스템은 메인제어기로부터 레버 및 페어 제어 데이터를 주기적으로 전송 및 저장하여, 위험 상황이 발생하게 될 때, 저장된 데이터를 로드 및 재생하게 된다. 프로세스는 Fig. 6과 같다.
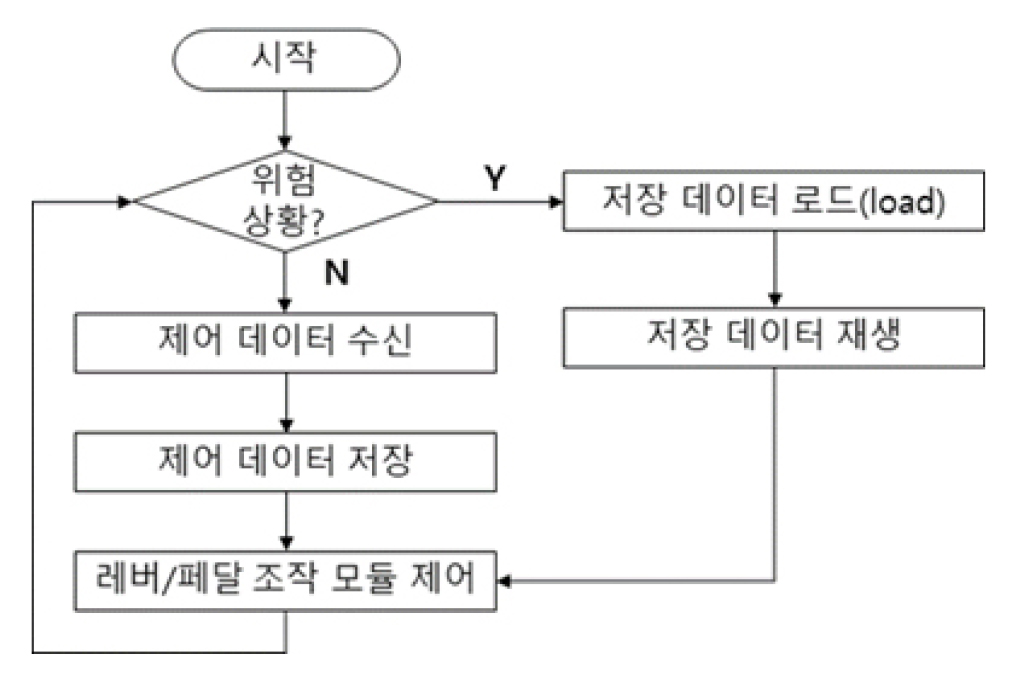
메인제어기에 전달되는 레버 및 페달 제어데이터는 총 6개의 정보를 가지며, 각각의 위치 정보는 1byte를 가진다. 1회 제어 명령에 대한 데이터 저장은 6byte가 필요하며, 저장 순서 명령 2byte를 추가하여 총 8byte의 메모리를 사용한다. 저장 공간인 스택은 Last In First Out(LIFO) 구조를 사용하며, 마이크로프로세서 저장 공간에서는 2,500개의 데이터를 저장할 수 있다. 원격 제어 명령 주기는 40ms이며, 총 10초 동안 데이터 저장이 가능하다.
굴착 작업의 위험 상황에 대한 판단은 총 8단계인 굴착기의 부하도 계산을 통해 이루어지게 된다. 원격 조종을 통해 조작 명령이 발생하게 되면, 굴착기의 스펙에 정의되어 있는 최대 작업 가능 자세를 100을 기준으로 균등분할하여 작업 단계에 따라 게인 값을 적용하여 굴착기의 자세 값을 보정하게 되며(Table 2), 최종적으로 굴착기의 기울기 정보를 계산하게 된다. 센서를 통해 위험 상황이 판단될 경우, 저장된 제어 명령 데이터를 역 순으로 재생하게 되며, 안정된 자세로 복귀하게 되면, 재생 프로세스는 멈추고 일반 제어 명령을 수행하게 된다.
4. 원격 굴착 작업 실험 평가 및 결과
상용화된 굴착기 무인화 장비 및 원격 조작 스테이션을 활용하여 굴착 작업에 대한 효율성을 평가하기위해 Fig. 7과 같이 실험 환경을 조성하였다. 또한 숙련자 및 비숙련자, 영상 지원 개수(1개 또는 3개), 원격 조작 장치 종류(휴대용 조종기 또는 캐빈 타입 조작 시스템)에 따라 원격 작업 효율을 비교하였다. 실험 환경은 기사 실기 실험 환경과 유사하게 고려하고자, 5m 배수로 파기, 반복 굴착 작업, 대상물 이송 및 터치 에 대한 작업을 수행하였다. 대상물 터치 작업을 제외한 나머지 작업에서는 4가지의 조건으로 정의하여 실험을 진행하였다.
조건 1 – 영상 1개 및 휴대용 원격 조종기
조건 2 – 영상 3개 및 휴대용 원격 조종기
조건 3 – 영상 1개 및 캐빈 타입 조종기
조건 4 – 영상 3개 및 캐빈 타입 조종기

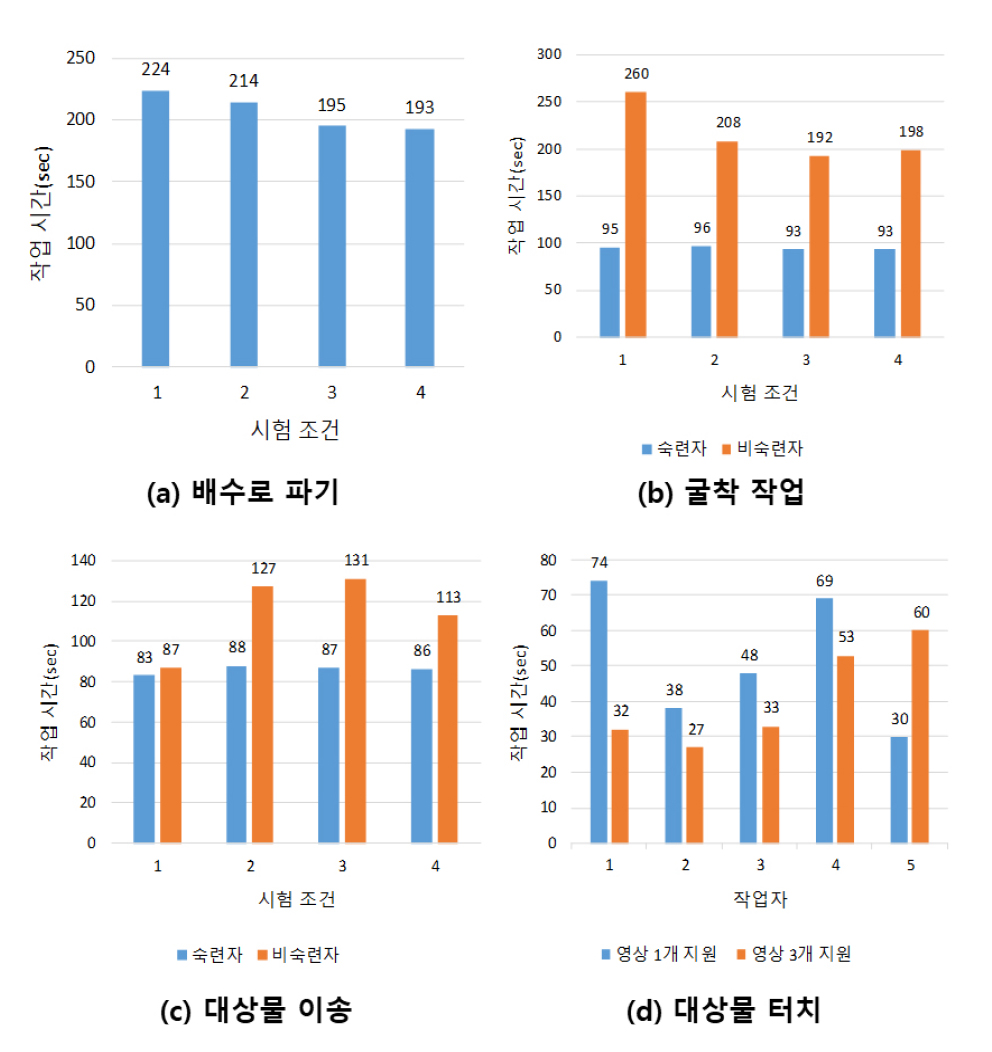
배수로 파기는 토사를 굴착하여 배수로 측면에 버리고 다시 굴착했던 지점으로 가서 작업을 수행하는 작업으로 작업자의 숙련도에 영향을 많이 받는다. 실험 조건은 숙련자 기준 영상 개수 및 원격 조작 장치 종류에 따라 작업 효율을 비교하기 위해 시간을 측정하였다. Fig. 8(a)과 같이, 배수로 파기 작업은 조건 4 에서 효율적인 작업이 이루어졌으며, 총193초의 시간이 걸렸다.
숙련자 및 비숙련자의 작업 효율을 비교하기 위한 굴착 및 대상물 이송 작업에서는 동일 작업 대비 숙련자의 작업 시간이 비숙련자의 작업 시간보다 시간이 적게 걸린 것을 확인하였으며, 숙련자는 영상 지원 개수 및 원격 조종기 종류와 상관없이 작업 시간의 변화가 미비하는 것을 확인하였다(Fig. 8(b), (c)).
대상물 터치 작업에서는 비숙련자 총 5명의 작업자를 대상으로 영상 지원 개수에 따라 작업 시간이 단축되는지에 대해 실험을 진행하였다. Fig. 8(d)를 보게 되면, 작업자 5를 제외한 영상 지원 개수가 많아질수록 작업 시간이 단축되는 것을 확인할 수 있다.
원격 작업 효율 을 고려할 경우, 숙련자의 배수로 작업은 평균 47.2%, 굴착 작업은 75.3%, 대상물 이송 작업은 79.1%의 작업 효율을 보인다. 비숙련자는 모든 작업에서 일정한 경향성을 보이지는 않지만, 대체적으로 영상 지원 개수가 많아질수록, 43~71%의 작업 효율을 보였다.
5. 결 론
본 연구에서는 상용화된 유압식 굴착기를 활용하여 무개조 기반 굴착기 무인화 시스템을 제시하였으며, 영상 지원 개수 및 원격 조작 장치에 따라 굴착기 작업 시간에 대한 효율성을 검증하였다.
탈부착이 가능한 레버 조작 모듈 및 페달 조작 모듈을 개발하였으며, 작업 공간의 성능 향상을 위한 맵핑 알고리즘을 개선하였다. 이를 통해 5.8~17.4%의 작업 공간을 확장하였다. 또한 굴착기의 원격 조작 시, 비상 상황을 대비하기 위한 안전 자세 복귀 알고리즘을 제시하여 시스템에 적용하였다.
굴착기의 원격 작업에 대한 효율성을 평가하기 위해, 휴대용 원격 조종 장치 및 캐빈 타입의 원격 조작 시스템을 활용하였다. 복잡한 작업 및 작업 시간이 길어질수록 캐빈 타입의 원격 조작 시스템을 활용하는 것이 작업에 더 효율적이며, 5m 배수로 파기 작업 기준으로 4.6~7%의 작업 효율을 보였다.
영상 지원 개수에 따라 작업자의 작업 효율을 평가 하였으며, 영상 지원은 숙련자보다 비숙련자에게 영향을 더 많이 주는 것을 확인하였다. 숙련자에게는 영상 지원 개수 및 원격 조종 시스템 종류에 따른 원격 작업 효과가 미비하였으며, 오히려 주요 영상 정보 또는 굴착기에 대한 데이터 정보 전달이 필요할 것으로 보인다.
