

1. 서 론
1.1 연구의 배경 및 목적
2. 관련 연구 동향
2.1 비전 기반 용접부 인식 기술 연구
2.2 포인트 클라우드 데이터셋 구축 및 활용 연구
3. BIM-Point Cloud 융합 기반 철골 접합부 데이터셋 구축
3.1 IFC 모델 기반 객체 분류 및 파트 식별 체계 정의
3.2 기하 연산 기반 용접부 형상 정제
3.3 포인트 클라우드 샘플링 및 좌표 정규화
3.4 데이터 구조화 및 통합
4. 세그멘테이션 기반 용접부 추출 모델
4.1 세그멘테이션 모델 선택 및 구성
4.2 손실 함수 구성
4.3 모델 학습 실행
4.4 모델 성능 평가
5. 결 론
1. 서 론
1.1 연구의 배경 및 목적
최근 건설산업에서 고소 작업 중 발생하는 추락 사고가 여전히 산업재해의 주요 원인으로 지적되고 있다. 2025년 상반기 기준 국내 산업 재해 사고 사망자 287명 중 138명(46.8%)으로 가장 높은 비중을 차지하였으며, 떨어짐(추락) 사고가 89명(64.5%)에 달한다(Ministry of Employment and Labor, 2025). 특히 고소작업대에서의 추락사고는 지속적으로 발생하고 있으며, 고용노동부에 따르면 2012년부터 2020년까지 9년간 고소작업대로 인한 사고사망자 175명중 135명(78.5%)이 건설업에서 발생한 것으로 보고된다. 이는 고소작업의 안전관리 체계가 근본적으로 취약함을 보여주며, 인력 의존적 작업 방식의 한계를 드러낸다.
또한, 국내 건설 산업 전반에서 숙련 기능인력의 고령화와 청년층 유입의 감소로 인해 용접공을 비롯한 고위험·고숙련 직종의 인력 부족이 심화되고 있다. 한국건설산업연구원에 따르면, 2024년 기준 건설근로자의 평균 연력은 51.8세로, 최근 10년간 지속적으로 상승함을 보여준다(Sung et al., 2025). 특히 용접 공종은 고소 및 협소 공간에서 수행되는 고위험 작업으로 높은 숙련도와 안전 인식이 필수적이나, 열악한 근로 환경과 불안정한 고용 구조로 인해 젊은 세대의 진입이 줄어들고 있다. 이로 인해 숙련공의 은퇴와 세대교체 부진이 동시에 발생하면서, 생산성 저하와 안전사고 위험 증가라는 구조적 문제가 나타나고 있다.
건설현장의 안전성과 생산성을 동시에 확보하기 위해서는 인력 중심의 기존 공정 관리 체계를 넘어, 지능형 로봇과 디지털 기술을 활용한 고소 용접 작업 자동화가 필수적이다. 하지만 지능형 기술 개발에 필수적인 학습 데이터, 특히 상세 철골 접합부에 대한 공공 데이터가 부재한 실정은 자동화 연구에 큰 걸림돌이 되고 있다. 이에 본 연구는 로봇을 활용한 고소 용접 자동화의 기반 기술을 마련하여, 건설 현장의 구조적인 안전 문제를 해결하고 저하된 생산성을 개선하는 방안을 제시하는 것을 목표로 한다.
2. 관련 연구 동향
2.1 비전 기반 용접부 인식 기술 연구
기존의 용접부 인식 연구는 주로 평판 구조물 또는 단순 판–판 접합부를 대상으로 수행되어 왔다. 3차원 포인트 클라우드 또는 2차원 영상 정보를 활용하여 모서리(edge) 검출, 곡률 및 법선 벡터 변화와 같은 기하학적 특징을 분석하거나, 영상 기반의 용접 비드 검출 기법을 통해 용접 위치를 추정하는 데 초점을 두고 있다(Takubo et al., 2023; Ahmed et al., 2018). 최근에는 구조광 또는 레이저 스캐너를 통해 작업물의 포인트 클라우드를 획득하고, 용접선이나 특징점을 추출하여 로봇 용접 경로를 생성하는 연구도 보고되고 있다(Zhou et al., 2024).
이러한 접근법은 단일 부재 또는 단순 형상의 접합부를 대상으로 하며, H형강 단면이 갖는 복합적인 기하학적 형상과 부재들이 접합될 때 형성되는 상세 철골 접합부의 복잡성을 충분히 반영하지 못한다. 또한, 용접부를 작업 인지를 위한 객체 단위로 인식하기보다는 기하학적 특징이나 선을 검출하는 수준에 머무르는 경우가 많아, 지능형 로봇 용접 자동화를 위한 고수준 작업 인식에는 한계가 있다.
한편, BIM(Building Information Modeling)과 포인트 클라우드를 결합한 연구에서는 설계 모델과 현장 스캔 데이터 간의 정합을 통해 구조 부재의 위치를 인식하고 시공 상태를 분석하는 접근이 이루어지고 있다. 비전 기반 포인트 클라우드를 BIM 모델과 정합하여 철골 구조물의 시공 정확도를 평가하거나, 설계 정보를 기반으로 작업 위치를 추정하는 연구들이 보고된 바 있다(Li et al., 2025). 이러한 BIM 기반 접근법은 설계 정보를 직접 활용할 수 있다는 장점이 있으나, 정합 정확도에 크게 의존하고 실제 시공 오차나 형상 변형에 민감하며, 용접부를 학습 가능한 객체 단위로 인식하기보다는 설계 좌표 기반 추정에 머무르는 한계를 가진다.
2.2 포인트 클라우드 데이터셋 구축 및 활용 연구
포인트 클라우드 기반 객체 인식 및 분할 연구를 위해 ShapeNet, PartNet과 같은 범용 3D 벤치마크 데이터셋이 널리 활용되고 있다. 해당 데이터셋은 객체의 기하학적 구조를 세부 파트 단위로 분할하여 제공한다(Chang et al., 2015; Mo et al., 2019). 그러나 이러한 데이터셋은 일상 객체나 기계 부품을 대상으로 구성되어 있으며, 철골 구조물이나 상세 철골 접합부와 같은 건설 분야의 특수한 형상을 포함하지 않는다.
건설 분야에서는 LiDAR 기반 포인트 클라우드를 활용한 대규모 구조물 모델링 및 시공 관리 연구가 수행되어 왔으며, 건물 외형이나 대형 구조물 수준의 형상 표현에 초점을 두고 있다(Oh et al., 2019). 해당 데이터셋은 대규모 공간 정보를 효율적으로 표현하는 데에는 적합하지만, 접합부나 용접부와 같은 미세 구조에 대한 정밀한 포인트 수준 라벨링을 제공하지 못한다는 한계를 가진다.
기존 데이터셋들은 복잡한 철골 접합부를 대상으로 용접부를 객체 단위로 학습 및 인식하기 위한 용도로는 활용이 어렵다. 이러한 학습 데이터셋의 부재는 지능형 용접 자동화를 위한 인공지능 모델 개발의 핵심적인 제약 요인으로 작용하고 있으며, 설계 정보와 실제 형상을 동시에 반영할 수 있는 체계적인 데이터셋 구축의 필요성을 시사한다.
3. BIM-Point Cloud 융합 기반 철골 접합부 데이터셋 구축
3.1 IFC 모델 기반 객체 분류 및 파트 식별 체계 정의
3.1.1 IFC 모델 기반 객체 분류
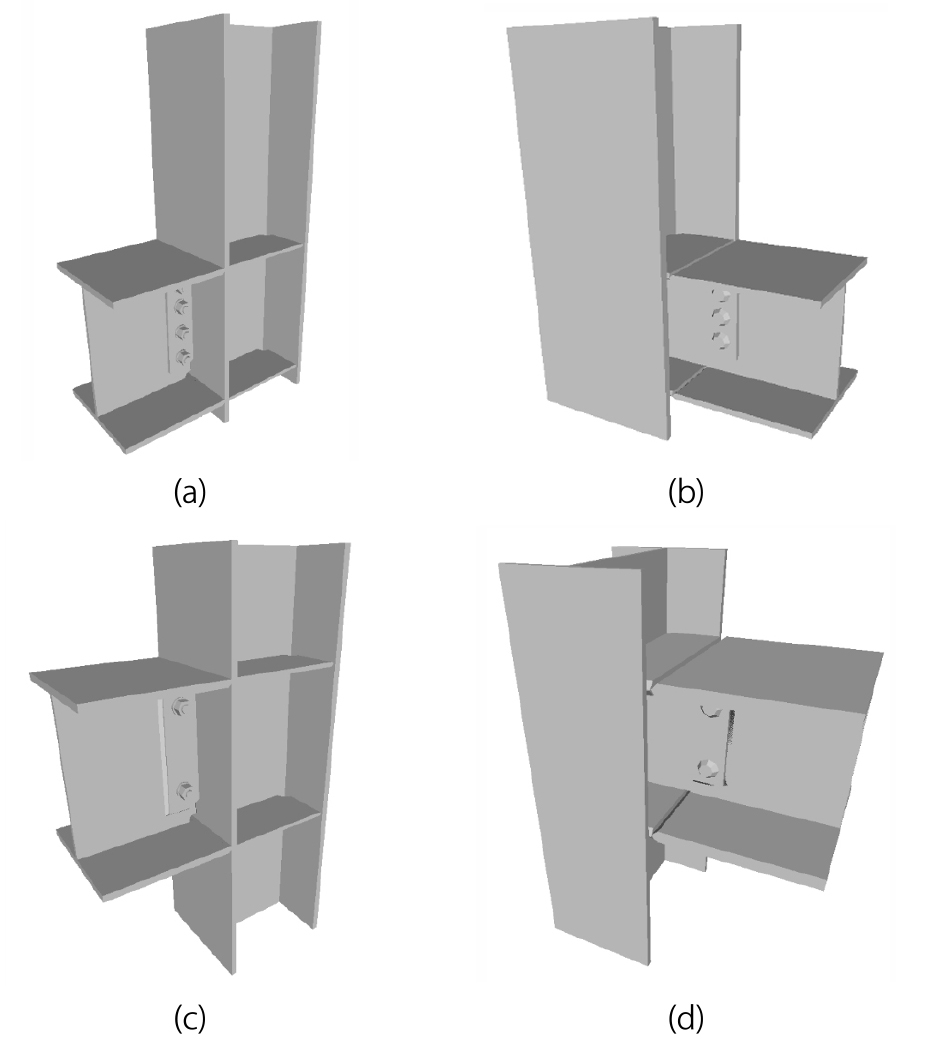
본 연구의 IFC 데이터셋은 건축 강구조 표준 접합 상세 지침과 실제 현장 도면을 반영하여 Tekla Structures기반 BIM 모델링을 활용해 설계되었다. Fig. 1과 같이 H형강 보-기둥의 대표적인 4가지 현장 용접 접합부 유형을 모델링하였다. 데이터셋의 다양성과 포괄성을 높이기 위해, 각 유형별로 단면 치수, 부재의 길이 및 상대 위치, 보강 플레이트 유무, 고력 볼트의 배치 등 주요 변수를 조합하여 30개의 변형 모델을 생성하였으며, 총 120개의 IFC 모델을 확보했다.
생성된 IFC 소스 모델을 기반으로 IFC 처리 라이브러리인 IfcOpenShell을 활용하여 IFC 파일 내의 IfcProduct 엔티티를 파싱하고, 객체 분류를 진행한다. 분류는 IFC 스키마 상에 정의된 표준 부재 유형을 기준으로 1차 분류를 진행하였으며, IfcFastener, IfcMechanicalFastener와 같이 하위 유형 구분이 필요한 경우 객체의 메타데이터 속성에서 ‘TSBM2’, ‘WELD’와 같은 특정 키워드를 탐색하는 과정을 동반한다. 해당 과정을 통해 모든 객체는 사전 정의된 클래스로 일관되게 분류되며, Python 기반의 3차원 메시(Mesh) 처리 라이브러리인 Trimesh를 통해 후속 처리가 용이한 3D 메시 구조로 변환된다.
3.1.2 파트 식별 체계 정의
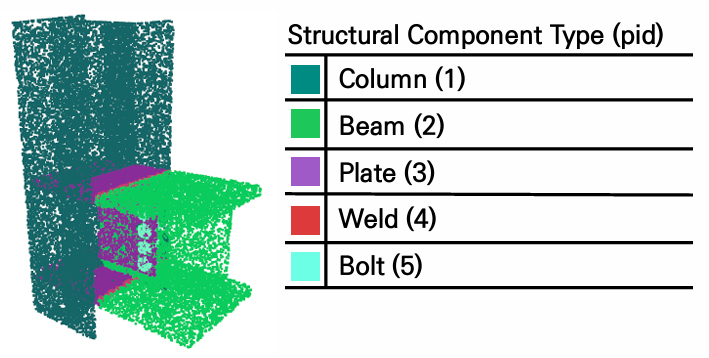
학습용 데이터셋을 구성하기 위해서는 객체 단위 라벨을 포인트 수준으로 일관되게 매핑하기 위한 파트 식별자(Part identifier) 정의가 필요하다. IFC 모델이 메시 기반 형상으로 변환되는 과정에서 각 객체의 기하 정보와 메타데이터를 참조하여 Table 1과 같이 pid 매핑 체계(Pid map)를 설정함으로써, 이후 메시 데이터에서 포인트 클라우드 데이터를 샘플링할 때 각 포인트가 원본 부재 정보를 유지할 수 있도록 한다. 해당 절차를 통해 구축된 pid 매칭은 모델의 라벨 일관성과 재현성을 확보하기 위한 핵심 요소로 작용한다.
Table 1.
Part identifier (pid) mapping by IFC entity type
| IFC Entity | Part Identifier (pid) |
| IfcColumn | 1 |
| IfcBeam | 2 |
| IfcPlate | 3 |
| IfcFastener/Weld | 4 |
| IfcMechanicalFastener/ | 5 |
3.2 기하 연산 기반 용접부 형상 정제
분류가 완료된 IFC 객체 중 용접 대상이 되는 구조 부재는 하나의 통합 참조 메시로 병합된다. 이후 각 용접부 객체에 대해 참조 메시와의 기하학적 근접 관계를 분석하여 실제 물리적 접촉면을 정밀하게 추출한다. 해당 과정은 파이썬 기반 기하 처리 라이브러리인 Trimesh의 근접 탐색 기능을 활용하여, 용접부 메시의 각 면 중심점에 대해 구조 부재 표면까지의 최소 거리와 면 법선 벡터 간의 상대 각도를 계산함으로써 수행된다.
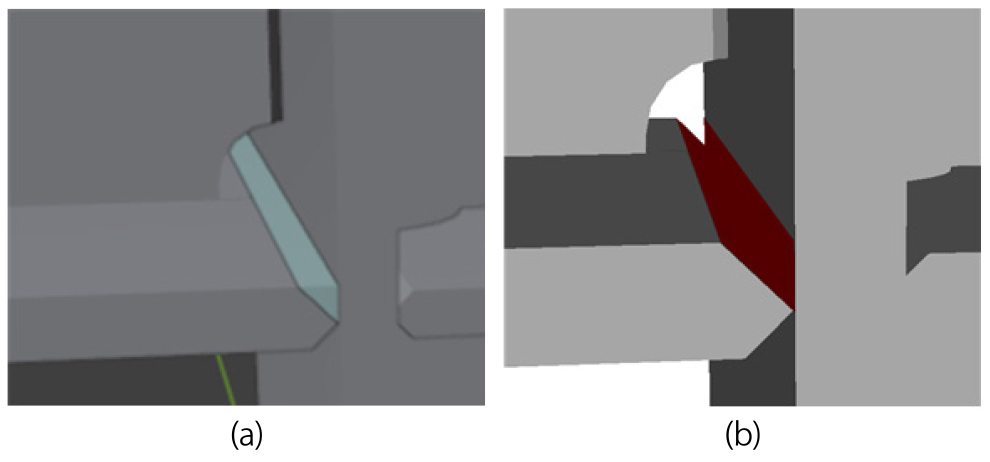
3D 모델링 상에서 용접부와 구조 부재는 밀리미터 이하의 미세한 간극을 두고 배치되며, 접합면의 법선 방향은 평행하다. 이를 고려하여 접합면 간 최소 거리 임계값을 3 mm로, 법선 벡터 간 각도 차이 임계값을 10°로 설정하였으며, 두 조건을 동시에 만족하는 경우에 한하여 해당 면을 실질적인 접촉면으로 정의하였다. 반면 조건을 충족하지 않는 비접촉 영역은 제거함으로써, Fig. 2와 같이 실제 용접이 이루어지는 물리적 접합 경계를 보다 정확하게 반영하도록 하였다. 유효한 접촉면이 존재하지 않는 용접부는 분석 대상에서 제외하여 데이터셋의 기하학적 일관성과 신뢰성을 유지하도록 한다.
기하 연산 기반 필터링은 불리언 교차 연산(Boolean intersection operation)에 비해 경계 노이즈와 형상 왜곡에 대한 민감도가 낮다. 불리언 연산은 메시 정합 오차나 미세한 형상 불연속에 의해 교차면이 불안정하게 생성되는 반면, 본 방법은 면 중심점의 거리와 법선 관계를 통해 공간적 인접성과 물리적 접합 관계를 평가함으로써 보다 강인한 접촉면 추출이 가능하다. 이를 통해 정제된 용접부 메시는 실제 구조 부재 간의 접합 경계를 물리적으로 반영한다.
3.3 포인트 클라우드 샘플링 및 좌표 정규화
3.3.1 포인트 클라우드 샘플링
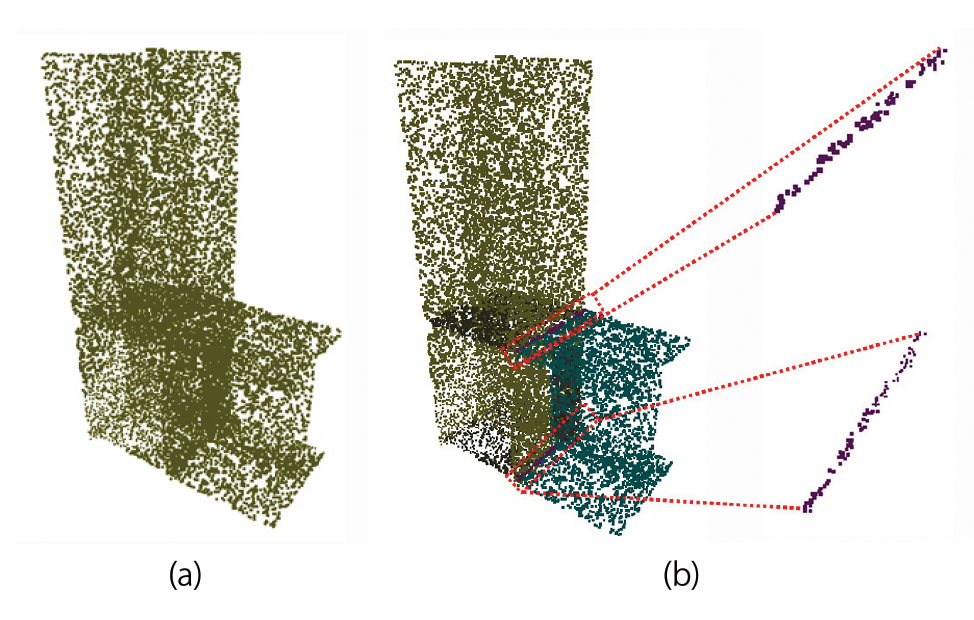
Fig. 3과 같이 정제된 메시로부터 표면을 균등하게 샘플링하여, 모든 샘플이 동일한 점 개수를 갖도록 포인트 클라우드를 생성한다. 각 포인트에는 좌표(x,y,z), 법선(nx,ny,nz)과 앞서 정의한 파트 식별자(pid)가 부여된다.
모든 객체는 메시의 정점 분포나 형상 복잡도와 무관하게 표면을 기준으로 균등하게 샘플링되며, 이를 통해 부재 규모나 형상 복잡도에 따른 포인트 밀도 편차를 최소화하고 접합부 간 데이터 분포의 일관성을 유지한다. 용접부와 같은 소수 클래스의 경우, 포인트 수가 과도하게 적어지지 않도록 최소 표본 수를 설정하고, 부족한 경우 오버샘플링을 수행한다. 잔여 포인트는 주요 구조 부재의 표면에서 균등하게 샘플링하여 전체 점 개수를 보정하였으며, 이를 통해 모델 학습 과정에서 소수 클래스의 데이터 손실을 최소화하고 학습 과정의 안정적 수렴을 유도할 수 있다.
3.3.2 좌표 정규화
샘플링된 포인트 클라우드는 중심 정렬과 최대 반경 기반 정규화를 통해 단위 구 내부로 스케일링된다.
전체 포인트 클라우드 좌표 집합 의 공간적 중심점 를 계산한다. 중심점은 전체 포인트 분포의 평균 위치를 의미하며, 좌표계 정렬의 기준점으로 사용된다.
각 포인트에서 계산된 중심점 를 감산하여 모든 포인트가 원점(0,0,0)을 기준으로 재배치되도록 중심 정렬을 수행한다.
이후 중심 정렬된 포인트 집합 으로부터 각 포인트의 원점 기준 유클리드 거리를 계산하고, 그 중 최댓값을 최대 반경 로 정의한다.
는 포인트 클라우드를 완전히 포함하는 최소 구의 반경을 의미하며, 전체 좌표계를 정규화하기 위한 스케일 기준으로 사용된다. 각 포인트를 해당 반경으로 나누어 스케일을 조정함으로써, 모든 포인트가 반경 1 이하의 단위 구 내부에 위치하도록 변환한다.
좌표 정규화 과정을 통해 포인트 클라우드는 절대적인 크기나 기존 좌표계의 단위와 무관한 동일한 스케일 체계로 변환된다. 서로 다른 접합부 모델 간의 스케일 편차와 좌표계 불일치가 제거되어 모든 데이터가 동일한 공간적 기준 위에서 학습될 수 있다.
3.4 데이터 구조화 및 통합
철골 접합부 학습 데이터셋은 대규모 3차원 포인트 클라우드 데이터를 효율적으로 저장하고, 계층적 라벨 구조를 명시적으로 표현하기 위해 HDF5(Hierarchical Data Format version 5) 기반의 데이터 구조로 통합하였다. HDF5는 대용량 데이터의 계층적 저장과 병렬 입출력을 지원하는 포맷으로, 구조화된 메타데이터를 함께 관리할 수 있다는 점에서 3차원 형상 인식 및 학습 데이터의 조직화에 적합하다.
데이터셋은 상위 클래스에 해당하는 접합 유형 단위로 구분된 HDF5 파일로 구성되며, 각 파일에는 동일한 데이터 구조를 갖는 복수의 접합 모델 샘플이 포함된다. 각 샘플은 포인트 클라우드 데이터, 부재 단위 식별자, 접합 상세 유형을 나타내는 클래스 라벨의 세 가지 데이터 구성 항목으로 이루어진다. 각 항목의 구체적인 데이터 차원 및 구성은 Table 2에 제시하며, 여기서 B는 모델 수, N은 포인트 개수, D는 좌표 및 법선 성분을 포함한 특징 차원을 의미한다.
Table 2.
HDF5-based 3D learning dataset structure
데이터셋의 구조는 PartNet의 And-Or-Graph 기반 계층적 템플릿을 참조하여(Mo et al., 2019), 철골 접합부 데이터의 도메인 특성에 맞게 ‘접합 유형–상세 유형–부재 단위’의 3단계 계층 구조로 확장하였다. 상위 수준의 접합 유형은 HDF5 파일 단위로 분리되어 관리되며, 동일 파일 내에서는 중간 수준의 상세 유형이 정수형 라벨(label)을 통해 구분된다. 하위 수준에서는 각 포인트가 부재 단위 파트 식별자(pid)를 통해 개별 구조 부재와 연결되며, label과 pid는 단순한 데이터 속성이 아니라 데이터셋 내 상위–하위 관계를 정의하는 계층적 식별자로 기능한다. 즉, label은 모델 단위의 의미적 구분을 담당하고, pid는 포인트 단위의 구조적 구분을 담당함으로써 데이터셋 내부에 상호 참조 가능한 의미적 위계를 형성하며, 3차원 형상의 기하학적 특성과 의미적 속성을 통합적으로 표현할 수 있다.
4. 세그멘테이션 기반 용접부 추출 모델
4.1 세그멘테이션 모델 선택 및 구성
3차원 포인트 클라우드 시멘틱 세그멘테이션은 데이터의 비정형성, 불균일한 점 밀도, 국소적 기하 구조의 복잡성으로 인해 효과적인 특징 표현이 핵심적인 과제로 지적되어 왔다(Benallal et al., 2025). 이러한 특성으로 인해 포인트 클라우드 데이터를 직접 처리하면서도 점 간의 기하학적 관계를 효과적으로 학습할 수 있는 Point-based 딥러닝 모델이 다양한 응용 분야에서 활용되고 있다.
대표적인 Point-based 세그멘테이션 모델로는 PointNet, PointNet++, DGCNN(Dynamic Graph CNN)이 있다. PointNet은 포인트 클라우드를 순서 없는 집합으로 처리하고 대칭 함수(max pooling)를 통해 전역 특징을 추출함으로써, 포인트 순열 불변성을 만족하는 효율적인 구조를 제안하였다(Qi et al., 2017a). 하지만 개별 포인트를 독립적으로 처리한 후 전역 특징을 집계하는 구조적 특성으로 인해, 인접 포인트 간의 국소적 기하 관계를 명시적으로 모델링하는 데에는 한계가 있음이 지적되어 왔다.
이러한 한계를 보완하기 위해 제안된 PointNet++는 계층적 샘플링과 국소 영역 기반 학습을 도입하여 다중 스케일의 지역 특징을 추출할 수 있도록 확장되었다(Qi et al., 2017b). PointNet++는 복잡한 장면이나 비균일한 포인트 밀도 환경에서 향상된 성능을 보였으나, 여전히 공간 좌표계 상에서 정의된 고정적인 이웃 관계에 의존하기 때문에, 포인트 간의 상대적 기하 관계가 특징 공간(feature space)에서 동적으로 변화하는 상황을 충분히 반영하기에는 제약이 존재한다.
반면, DGCNN은 각 계층에서 특징 공간 기반의 k-최근접 이웃(k-NN) 그래프를 동적으로 재구성하고, EdgeConv 연산을 통해 포인트와 이웃 간의 상대적 위치 및 방향 정보를 직접 학습함으로써 국소 기하 구조와 전역 문맥 정보를 통합적으로 표현할 수 있다(Wang et al., 2019). 이러한 동적 그래프 기반 학습 방식은 포인트 간의 기하학적 관계가 고정되지 않고 반복적으로 갱신되는 특징 공간 상에서 정의된다는 점에서, 고정 공간 이웃 정의에 기반한 기존 접근법과 차별성을 가진다.
본 연구에서 다루는 철골 접합부 포인트 클라우드 데이터는 H형강 단면의 복잡한 기하 형상과 함께, 용접부 주변에서 나타나는 미세한 형상 변화, 인접 부재와의 기하학적 유사성, 불균일한 점 분포를 포함한다. 이러한 특성은 용접부를 단순한 선이나 경계가 아닌, 구조 부재 간의 국소적 접합 영역으로 정밀하게 인식할 수 있는 모델을 요구한다. DGCNN의 동적 이웃 갱신 메커니즘은 용접부와 인접 구조 부재 간의 미세한 형상 차이를 특징 공간 상에서 효과적으로 분리할 수 있으며, 국소 기하 구조의 연속성이 중요한 접합부 영역에서 보다 유연한 표현 학습이 가능하다. 이에 본 연구에서는 철골 접합부 내 용접부를 객체 단위로 인식하기 위한 세그멘테이션 모델로 DGCNN을 채택하였다.
4.2 손실 함수 구성
용접부는 데이터셋 내에서 상대적으로 적게 등장하는 소수 클래스로, 단순한 교차 엔트로피(Cross Entropy) 손실만을 사용할 경우 다수 클래스가 우세한 방향으로 학습이 수렴하는 문제가 발생하기 쉽다. 이에 본 연구에서는 학습 초기 단계에서 가중 교차 엔트로피(Weighted Cross Entropy)를 적용하여 기본적인 분류 성능을 안정적으로 확보한 뒤, 일정 에포크 이후에는 Focal Loss와 Dice Loss를 결합한 복합 손실 스케줄링 전략을 도입하였다.
Focal Loss는 분류가 쉬운 샘플에 대한 손실 기여를 감소시키고, 오분류되기 쉬운 샘플에 더 큰 가중을 부여함으로써 클래스 불균형 문제를 완화하고 소수 클래스에 대한 학습을 강화하는 손실 함수로 제안되었다(Lin et al., 2017). 반면, Dice Loss는 예측 영역과 실제 영역 간의 중첩 정도를 직접 최적화하는 방식으로, IoU 기반의 분할 성능 향상에 효과적이며, 특히 가늘고 면적이 작은 구조와 같이 포인트 수가 제한적인 클래스의 정밀 분할에 유리한 것으로 보고된다(Sudre et al., 2017). 해당 손실 함수의 특성을 고려하여 구성된 복합 손실 함수는 단일 교차 엔트로피 기반 학습 대비 소수 클래스인 용접부의 경계 인식 성능을 향상시키고, 포인트 단위의 클래스 불균형을 보다 효과적으로 완화하는데 기여한다.
4.3 모델 학습 실행
본 연구에서 채택한 DGCNN 기반 세그멘테이션 모델은 PyTorch 환경에서 구현되었으며, 학습 데이터는 보-기둥 접합부 유형의 HDF5 구조 포인트 클라우드 데이터셋을 사용하였다. 원본 데이터는 약 20,000개의 포인트로 구성되어 있으나, 학습 효율성과 메모리 균형을 고려하여 학습 단계마다 8192개 점을 균등 샘플링하여 입력으로 사용하였다.
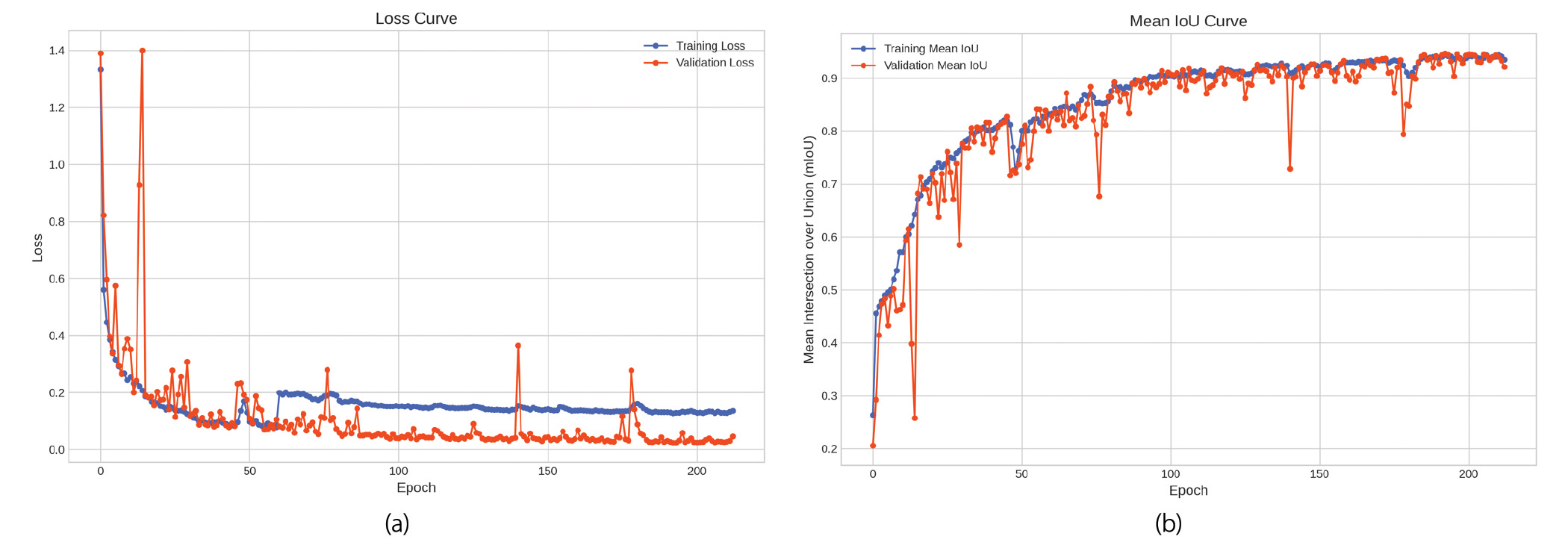
모델 학습은 총 212에포크 동안 수행되었으며, 초기 60에포크까지 가중 교차 엔트로피 손실을 적용하였다. 61에포크부터 Focal Loss와 Dice Loss를 결합한 복합 손실 함수로 전환하여 학습을 진행하였다.
학습 과정에서 각 에포크마다 계산된 손실값과 MIoU(Mean Intersection over Union)를 지속적으로 모니터링하였으며, 학습 종료 후 테스트 MIoU가 높은 모델을 최종 선정하였다. 학습 및 검증 과정에서의 손실값 및 MIoU 변화 추이는 Fig. 4와 같이 나타난다.
4.4 모델 성능 평가
학습이 완료된 모델은 총 25개의 테스트 세트에서 평가되었으며, 전체 클래스에 대한 MIoU는 0.944로 확인되었다. Table 3에 제시된 바와 같이, 기둥, 보, 플레이트와 같은 구조 부재에서는 정밀도(Precision), 재현율(Recall), F1-score가 모두 0.97 이상으로 나타나 전반적으로 높은 분할 성능을 보였다.
Table 3.
Segmentation performance metrics by structural component class
| Class | Precision | Recall | F1-score | Support |
| Column | 1.00 | 1.00 | 1.00 | 123776 |
| Beam | 0.99 | 0.99 | 0.99 | 47409 |
| Plate | 0.97 | 0.99 | 0.98 | 26390 |
| Weld | 0.96 | 0.88 | 0.92 | 3050 |
| Bolt | 0.95 | 0.95 | 0.95 | 4175 |
용접부는 데이터셋 내에서 상대적으로 적은 포인트 수를 가지는 소수 클래스임에도 불구하고, 정밀도 0.96, 재현율 0.88, F1-score 0.92로 확인되어 안정적인 인식 성능을 달성하였다. Fig. 5는 학습된 모델을 통해 각 부재가 세그멘테이션된 결과를 보여주며, 형상이 가늘고 경계가 불명확한 용접부의 기하학적 특성을 고려할 때 제안된 세그멘테이션 모델이 소수 클래스에 대해서도 의미 있는 분할 성능을 확보하였음을 의미한다. 다만 용접부 클래스의 재현율이 다른 구조 부재에 비해 다소 낮게 나타난 점은 일부 용접부 포인트가 인접 부재로 오분류되었음을 시사한다. 이는 용접부가 인접 구조 부재와 기하학적 형상 및 법선 방향이 유사하고, 포인트 수가 상대적으로 제한적이기 때문에 경계 영역에서 특징 공간의 중첩이 발생한 결과로 해석된다.
5. 결 론
본 연구는 BIM과 포인트 클라우드 기술을 결합하여 철골 접합부의 학습용 3차원 데이터를 자동으로 구축하고, 세그멘테이션 모델을 통해 철골 접합부 내에서 용접부를 구조 부재로부터 객체 단위로 정밀하게 추출할 수 있음을 검증하였다. IFC 기반 BIM 설계 정보를 활용한 데이터셋 생성 과정과 기하 연산 기반 용접부 형상 정제를 통해 실제 접합부의 물리적 특성을 반영한 신뢰도 높은 학습 데이터를 확보하였으며, DGCNN 기반 세그멘테이션 모델은 복잡한 H형강 접합부 환경에서도 높은 MIoU와 안정적인 클래스별 분할 성능을 달성하였다. 특히 데이터 비중이 작은 소수 클래스인 용접부에 대해서도 의미 있는 인식 성능을 확보함으로써, 제안된 데이터 구성 방식과 학습 전략의 유효성을 확인하였다.
본 연구에서 사용된 데이터는 BIM 설계 정보를 기반으로 생성된 합성(Synthetic) 포인트 클라우드 데이터셋으로, 실제 건설 현장에서 획득되는 스캔 데이터에 비해 센서 노이즈, 가림, 포인트 밀도 불균일성, 시공 오차로 인한 형상 변형 등이 제한적으로 반영되어 있다. 제안된 방법을 실제 현장 데이터에 적용하기 위해서는, 다양한 센서 환경에서 발생하는 노이즈 특성과 BIM 설계 모델과 현장 스캔 데이터 간의 공간적 불일치를 고려한 추가적인 검증 및 보완 연구가 필요하다.
그럼에도 불구하고 본 연구의 결과는 건설 분야에서 부족했던 상세 철골 접합부 수준의 학습 데이터 문제를 체계적으로 보완할 수 있는 기반을 제시하며, 향후 실제 현장 스캔 데이터를 활용한 데이터셋 확장과 도메인 적응 학습을 통해 적용 범위를 넓힐 수 있을 것으로 기대된다. 특히, 로봇 용접 자동화 공정에서 용접 대상 영역의 자동 인식 및 용접 경로 생성 그리고 BIM 기반 디지털 트윈 환경에서의 시공 상태 인지 및 갱신에 직접적으로 활용될 수 있어, 지능형 용접 로봇의 작업 인지 기술과 건설 자동화 시스템의 구현 가능성을 높이는 기술적 토대를 제공한다.
