

1. 서 론
2. 양중 작업 시간 추정 관련 연구 및 한계점
3. 경로 생성 시뮬레이션 데이터 기반 양중작업 소요시간 추정
3.1 강화학습 기반 양중 시뮬레이션
3.2 양중 작업 및 가상 데이터 수집 및 기계학습 모델
4. 결 과
5. 결 론
1. 서 론
최근 건설업에서는 건설기계 및 중장비의 지능화 및 자동화가 빠르게 진행되고 있다. 현재 유인 건설기계가 지배적인 전통적 건설 환경과는 달리, 앞으로의 건설 현장에서는 전면적으로 건설기계의 작업이 자동화 및 자율화될 것으로 예상된다. 특히, 타워 크레인은 건설 현장에서 가장 많이 사용되고 공유되는 자원 중 하나로 타워크레인 사용량은 도심지 건물의 고층화 추세에 따라 매년 급격히 증가하고 있다(Lee et al., 2009). 국토교통부 건설기계 현황 통계(국토교통부 건설산업과, 2021)에 따르면 2021년 우리나라의 타워크레인 수는 약 6,000대로 집계되고 있으며, 이는 10년전 3,073대에 비해 약 2배 증가한 수치이다. 이러한 타워크레인은 건설현장의 물류 허브와 같은 역할을 수행하며 시공 전반의 공정 진행에 주요한 영향을 줄 수 있다.
타워크레인 운용에서 정확하게 추정된 양중 소요시간은 프로젝트의 공기 선정이나 일정 문제에 결정적인 지표로 사용되기 때문에 시공 이전의 계획단계에서 중요하다(Zhang and Pan, 2020). 예를 들어, 반복적인 양중 작업이 많은 모듈러 현장에서는 단일 양중 작업 소요시간을 활용하여 각 모듈의 설치 작업에 지연이 없도록 일정을 계획해야 한다(Kim et al., 2018). 이를 위해 각 설치 작업에 할당된 타워크레인의 작업시간이 겹치지 않도록 조율하기 위해서는 정확한 양중작업 소요시간 예측이 필요하다.
이러한 양중 소요시간에 영향을 미치는 주요 요인은 양중작업의 수요와 공급 위치, 크레인의 동작 및 기계적 특성, 현장 조건, 기상 조건 등으로 다양하고 복잡하다(Leung and Tam, 1999; Tam et al., 2002). 하지만 기존의 경험적 약산식을 이용한 방법이나 축적된 실적자료를 이용한 평균적인 소요시간 산출 방식은 현장 조건의 변화에 따른 양중 소요시간의 변화를 예측하는데 제한이 있다(조훈희, 2010). 특히, 현장 구조물의 기하학적인 특성이나 크레인의 동작과 같은 비정형적 정보는 수집하기 어렵기 때문에 양중작업 소요시간 예측시에 활용되지 못하고 있다.
이러한 배경에서 본 논문은 현장 조건과 크레인의 동작을 반영할 수 있는 가상 현장에서 양중 시뮬레이션 방법을 이용하여 가상의 양중 데이터 생성하고, 양중작업 소요시간을 예측하기 위한 기계학습 모델의 독립변수로써 사용될 수 있는지 그 활용 가능성을 평가하고자 한다.
2. 양중 작업 시간 추정 관련 연구 및 한계점
양중작업의 소요시간을 분석하고 예측하는 이전 연구들은 기계학습, 수학적 계산 모델, 이산 시뮬레이션과 같이 다양한 유형의 분석 기법을 활용하였다(Table 1). 대부분의 연구에서는 타워크레인의 양중작업에 영향을 미칠 수 있는 여러 요인들 중 타워 크레인의 위치와 적재 및 적하 위치 간의 변위나 권상 높이 등의 정형화된 정보만으로 양중 소요시간을 추정하였다. 반면, 크레인 운전의 조작성 및 편의성 등 많은 무형의 현장 정보들은 단순화되어 가정되거나 무시되고 있으며, 이러한 요인의 잠재성을 조사하는 연구는 제한적인 것으로 나타났다.
Table 1.
Summary of relevant literature on the lifting time estimation
| 저자 | 주요 연구 내용 |
| Leung and Tam (1999) | 다중회귀분석을 이용한 권상 시간 예측 |
| Tam et al.(2002) |
크레인 운전자의 숙련도 및 시야 정보가 권상 시간에 미치는 영향 조사 및 선형/비선형 신경망 모델을 이용한 권상 시간 예측 |
| Zhang et al. (1996) |
직교 좌표계를 기준으로 타워크레인의 선회 운동 및 수평방향 운동을 계산하여 이동시간을 계산하는 수학적 모델 제시 |
| Koh et al. (2002) | 크레인과 결합된 원형 창고 시스템의 운반 작업 시간 추정 연구 |
| Cho et al. (2012) | 이산 시뮬레이션 기반 권상 소요시간 예측 시뮬레이션 제시 |
| Han et al. (2012) | 3차원 애니메이션으로 정의된 양중 정보를 이용한 이산 사건 시뮬레이션 연구 |
예를 들어, Leung and Tam(1999)의 초기 연구는 양중 소요시간을 예측하기 위해 다중 선형 회귀 모델을 제안하고 양중 작업 일정 계획에 사용했다. 그들은 후속 연구에서 타워크레인의 양중 시간을 예측하기 위해 신경망을 사용하는 선형 회귀 모델과 비선형 모델을 추가로 제안했다(Tam et al., 2002). 또한 그들은 양중작업 소요시간에 영향을 미칠 수 있는 무형의 정보인 운전자의 숙련도 및 기상 조건을 점수화하고 이를 모델 학습에 활용하였다. Zhang et al.(1996)은 2차원 좌표계에서 크레인 위치와 적재 및 적하 지점의 위치 정보를 기반으로 크레인의 움직임에 따른 양중 시간을 계산하는 수학적 모델을 제시했다. 이 모델에서 크레인 모션을 접선, 방사형 및 수직 변화로 분해하고 각 방향의 거리를 각 속도로 나누어 동작 시간을 추정했다. 유사한 방법을 적용하여, Koh et al.(2002)는 타워크레인이 창고 시스템에서 물류 허브로 화물의 보관 및 반출 주문을 수행할 때의 양중 소요시간 추정하는 수학적 모델을 제안했다. 그러나 이러한 접근법은 크레인 운행 시의 속도 변화는 고려되지 않아 실제 크레인의 움직임을 반영하기에 한계가 있다. 이 문제를 다루기 위해, Cho et al.(2012)은 이산 사건 시뮬레이션을 적용하여 현장 조건을 변수화 하여 타워 크레인의 양중 작업 소요시간을 보다 현실적으로 예측하였다. 더 나아가, Han et al.(2012)는 이산 사건 시뮬레이션 기법과 사전 정의된 크레인의 3차원 애니메이션을 통합하여 양중작업을 시각화하고 작업 소요시간을 계산하였다.
이러한 노력은 크레인의 양중 시간을 추정하는 방법에 대한 이론적 토대를 제공하였다. 그럼에도 불구하고, 기존 연구에서는 여전히 기본적이면서도 불합리한 가정이 존재한다. 예를 들어, Hu et al.(2021)은 문헌 연구에서 이전 연구들은 크레인의 양중이 선형 궤적을 따라 수행되었다고 가정하여 양중 시나리오의 현장 조건 및 운동학적 특성이 무시된다고 지적하였다. 실제 크레인의 동작을 고려했을 때 직선 및 선형 궤도로 가정하는 것은 비현실적이고 부정확한 양중시간 추정을 야기할 수 있다.
3. 경로 생성 시뮬레이션 데이터 기반 양중작업 소요시간 추정
본 연구의 목적은 데이터 기반의 기계학습 기법을 적용해 양중작업 소요시간을 추정함에 있어 회전 각도나 양중 높이와 같은 작업 조건 외에 추가적으로 현장환경과 크레인 기계의 특성을 고려하여 양중작업 소요시간을 정확히 예측하는 것이다. 이러한 목적으로 설계도면 및 현장 정보를 기반으로 모델링된 가상 현장에서 강화학습 기반의 3차원 양중 시뮬레이션을 구현하고 이를 통해 가상의 작업 소요시간 데이터를 생성한다(Cho and Han, 2022). 이러한 가상 데이터는 현장 관측을 통해 수집된 작업조건에 대한 데이터와 함께 기계학습 모델의 입력변수로 활용이 되며, 수집된 실제 양중작업 소요시간을 출력변수로 예측하게 된다. 최종적으로 사례연구를 통해 현장 및 작업 조건으로 구성된 데이터와 가상의 양중 시간이 포함된 학습 데이터로부터 학습된 기계학습 기반의 양중작업 소요시간 추정 모델을 구현하고, 그 성능을 평가한다. 본 연구의 가상 양중작업 소요시간 데이터 생성은 저자의 이전 연구(Cho and Han, 2022)를 바탕으로 하며, 본 논문은 기계학습 모델링 및 평가에 중점을 둔다.
3.1 강화학습 기반 양중 시뮬레이션
강화학습은 예상되는 총 보상을 최대화하는 최적의 정책, 즉 특정 상태에서 이동할 위치를 결정하는 크레인의 의사 결정 과정을 학습함으로써 학습 환경의 관찰을 기반으로 행동을 생성하도록 에이전트를 훈련시키는 기계학습의 한 분야이다. 일반적으로 에이전트가 공간적, 시간적, 비용적 자율성이 뛰어난 가상환경 안에서 주어진 다양한 시나리오에서 수많은 시행착오를 겪으며, 주어진 상황의 변화에 능동적으로 대응하는 방법을 학습하도록 한다. 이러한 강화학습의 특성은 양중 작업에서 적재 지점에서 적하 지점으로 자재를 들어올릴 때의 상태(예, 크레인 자세, 적재 및 적하 지점의 위치)에서 다음 이동 위치를 자율적으로 결정하는데 효율적이다.
양중 작업 시뮬레이션을 통해 시공 현장의 공간적 제약과 타워크레인의 기계적 특성이 반영된 환경에서 실제적인 양중 동작을 생성하고 가상의 양중작업 수행시간 데이터를 생성하였다. 이를 수행하기 위해 기계 시스템에 의해 작동되는 3차원 타워크레인 모델을 이용해 시간-공간적 제약을 반영하는 강화학습 기반 타워크레인 양중 시뮬레이션(Cho and Han, 2022)을 활용하여 가상 양중작업 수행시간 데이터를 생성하였다. 구체적으로, 강화학습 기반의 동작 계획 모델은 양중 시나리오 조건(예: 인양물의 위치, 타워크레인의 자세)을 입력으로 수집하고 기계 시스템의 동작 매개변수를 출력으로 결정하는 신경망을 기반으로 하고 있으며, 학습된 동작 계획 모델을 활용하여 양중 시뮬레이션을 수행함으로써 현장의 특성과 타워크레인의 기계적 특성이 반영된 가상 데이터를 습득한다. 이 과정에서 학습된 모델은 주어진 환경에 따라 타워크레인의 동작 속도를 제어함으로써 현장의 공간적 제약과 크레인의 기계적 특성이 반영된 양중 시간 데이터를 생성하게 된다. Fig. 1는 BIM객체로 구성한 가상의 아파트 현장에서 구현된 시뮬레이션의 예시이다.
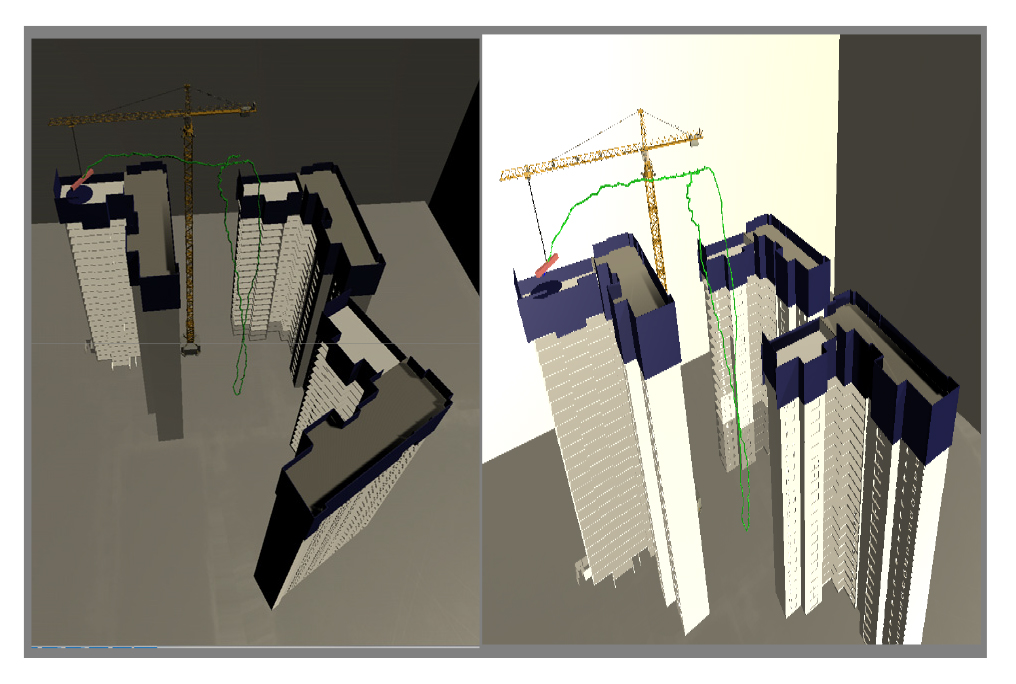
Figure 1.
Examples of crane lifting simulation for lift time data generation (re-generated from Cho and Han, 2022)
3.2 양중 작업 및 가상 데이터 수집 및 기계학습 모델
양중작업 소요시간을 추정하기 위한 기계학습 모델을 학습시키기 위해 현장관측을 통해 실제 양중 작업 데이터를 수집하였다. 현장에서 작업조건(적재 및 적하 위치), 양중 조건(선회 각, 양중 높이), 그리고 양중 작업 시간을 기록하였으며, 총 54개의 양중 작업 데이터가 수집되었다. 가상 데이터 수집을 위해서 현장 관측된 작업과 동일한 현장 및 작업 조건을 가상환경(예, Fig. 1)에 구현하였다. 이후 학습된 강화학습 모델을 이용하여 실제 양중 작업과 동일한 조건에서 시뮬레이션을 수행하고 가상 양중작업 수행시간 데이터를 수집하였다. 최종적으로 실제 양중 조건인 선회 각 및 인양 높이, 그리고 가상 양중작업의 수행시간을 독립변수로 설정하고, 실제 양중작업 소요시간을 종속변수로 설정하였다.
본 연구에서는 양중작업 소요시간을 추정하기 위해 의사결정나무 회귀 모델을 사용하였다. 의사결정나무 회귀 모델은 분할방식을 반복하여 의사결정을 위한 규칙들의 조합을 구축하는 기법으로, 이러한 분할과정에서 서로 유사한 데이터들을 귀납적으로 세분화하고 이를, 반복 진행하는 방식이다. 해당 모델은 정규성 및 선형성을 가정하지 않는 비모수적 방법이라는 특징이 있어, 다양한 영향 요인들에 의해 비선형성을 갖는 양중작업 소요시간(Tam et al., 2002)을 분석하기 위해 본 연구에 채택되었다.
이러한 의사결정 나무 모델을 이용하여 양중 소요시간을 추정하며, 가상 양중작업의 수행시간 데이터의 잠재성을 평가하기 위해서 두 가지의 학습 데이터로부터 모델을 학습시켜 그 성능을 비교하였다. 첫 번째 학습 데이터는 독립변수로 양중조건만 사용하였으며, 두 번째 학습 데이터는 양중조건과 함께 가상 양중시간 데이터를 독립변수로 사용하였다. 두 모델 모두 실제 양중 소요시간을 종속변수로 사용하였다. 이후 두 가지의 학습데이터 세트를 이용하여 양중 소요시간을 위한 학습을 수행하였다.
4. 결 과
회귀 모델의 성능을 평가하기 위해 교차 검증을 수행하였다. 교차 검증 결과(Table 2), 양중 조건만 고려한 회귀 모델은 265.380의 평균 제곱 오차(Mean Square Error), 11.966의 평균 절대 오차(Mean Absolute Error), 회귀 모델의 독립변수가 종속변수를 얼마나 잘 설명하는지 나타내는 결정계수(R2)는 0.547을 보였다. 반면, 강화학습 시뮬레이션의 가상 양중작업 수행시간을 독립변수에 추가한 경우 226.41의 평균 제곱 오차와 11.545의 평균 절대 오차, 그리고 0.6162의 결정계수로, 개선된 예측 성능을 보였다.
Table 2.
Cross validation and correlation coefficient results of the proposed lifting time regression model
| Performance Measure | Independent variable | |
| Lifting conditions | Lifting conditions and virtual data | |
| MSE | 265.380 | 226.406 |
| MAE | 11.966 | 11.545 |
| R2 | 0.547 | 0.616 |
| Correlation(r) | 0.947 | 0.953 |
Fig. 2은 의사결정나무 모델 회귀 분석을 통해 추정된 양중작업 소요시간의 분포를 양중 조건인 선회 각과 양중 높이에 따라 시각적으로 보여준다. Fig. 2(a)와 2(b)는 독립변수에 오직 양중 조건만 구성하여 학습시킨 회귀 모델로 추정한 양중작업 소요시간과 실제 관측된 양중시간의 분포이다. Fig. 2(c)와 (d)는 독립변수로 양중 조건과 함께 현장 조건(BIM)과 타워크레인의 기계적 특성이 반영된 강화학습 시뮬레이션에서 수집된 가상 양중작업 수행시간 데이터를 사용하여 학습시킨 모델의 양중작업 소요시간 추정 결과이다. 선회 각과 양중 높이의 경우 모두 현장 조건과 타워크레인의 기계적 특성을 반영했을 때 추정된 양중 소요시간과 실제 양중시간과의 유사성이 증가하였음을 알 수 있다.
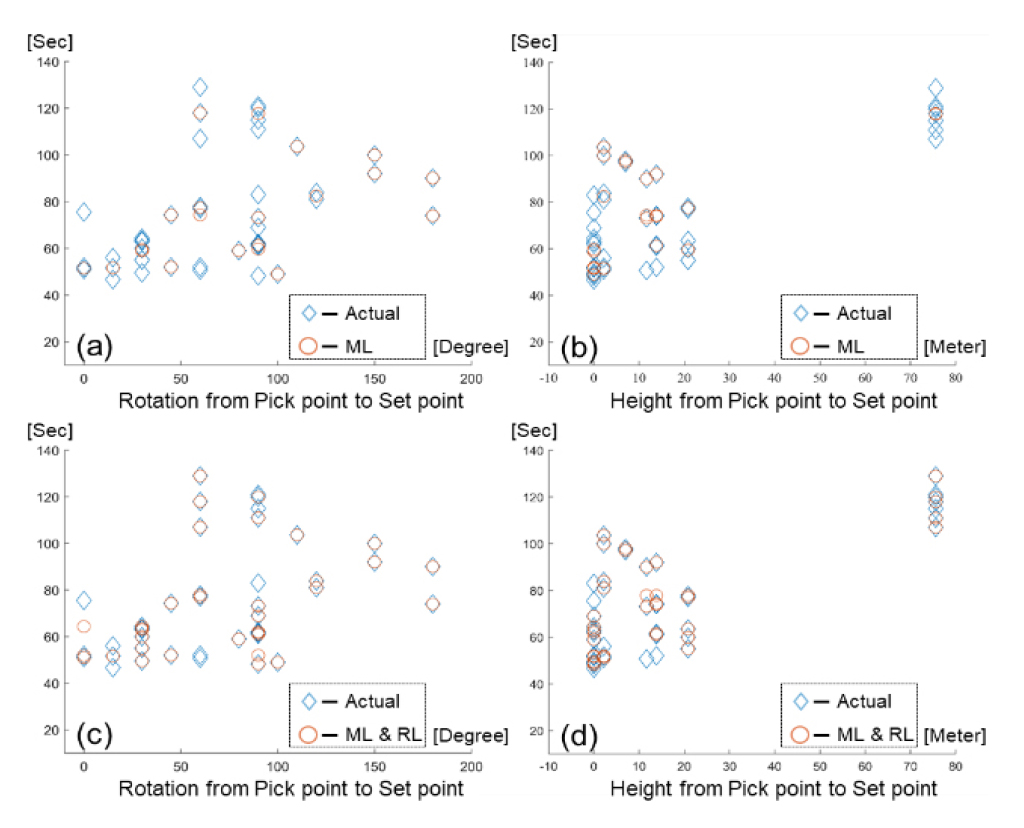
Figure 2.
Cycle time distribution for the comparison between the actual and predicted cycle times in rotation angles (a and b) and lifting heights (c and d): (a) and (c) are resulted from the use of only lifting conditions while (b) and (d) are resulted when using the simulation lifting times as an additional input
학습된 두개의 회귀 모델을 이용하여 현장 관측한 54개의 양중 작업의 양중작업 소요시간을 추정하여 상관관계를 조사하였다. 그 결과, 강화학습 시뮬레이션의 가상 양중작업 수행시간을 독립변수로 추가 사용한 회귀 모델의 추정 결과와 실제 양중시간 간 상관관계(Fig. 3(a))는 0.9533의 상관계수를 보이며, 종속변수로 양중 조건 정보만 활용한 회귀 모델의 추정 결과와 실제 양중 시간 간의 상관관계(Fig. 3(b))는 0.9474의 상관계수를 보였다. 두 모델 모두 예측 값과 실제 값 사이에 높은 상관관계를 가지는 것으로 나타났으며, 시뮬레이션으로부터의 가상 데이터를 사용할 경우 조금 더 향상된 성능이 보임을 알 수 있다.
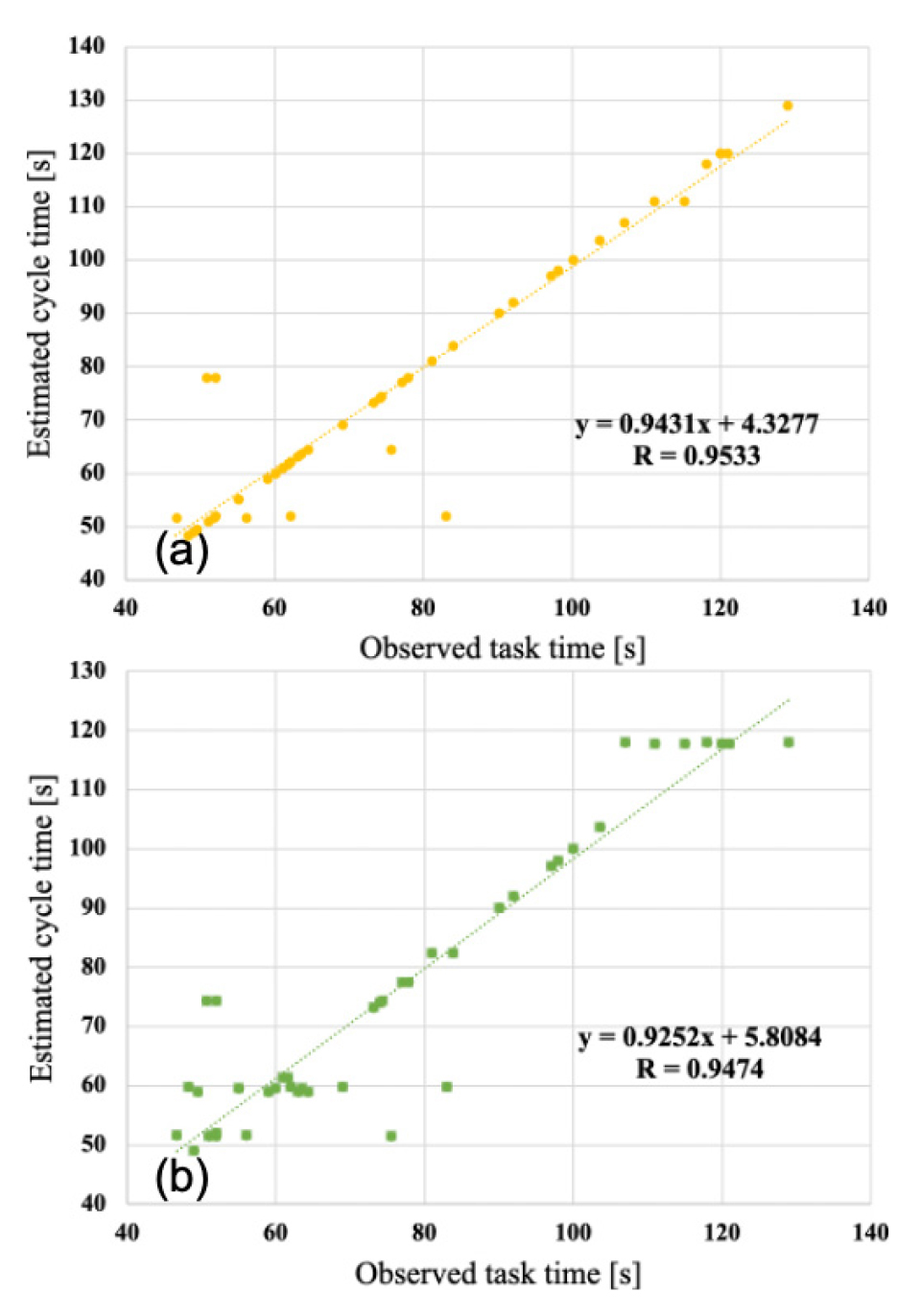
Figure 3.
Correlation of lifting time between field observation data and estimation: (a) the estimate of the model trained with lift conditions (e.g., rotation angle and hoisting height) as independent variables, and (b) the estimate of the model trained with lift conditions and virtual lifting time of reinforcement learning-based simulation as independent variables
5. 결 론
최근 건설 산업에 다양한 인공지능 기법이 연구되었지만, 그 활용성은 타 산업대비 낮은 편이다. 크레인 양중 작업의 경우 건설 현장의 특성을 담고 있는 비정형 데이터의 수집 및 활용이 제한적이며, 이로 인해 인공지능 모델의 정확성과 다양한 현장에 대한 범용성이 부족하다고 보고되었다(Hu et al., 2021). 이는 개별 현장의 특성을 반영할 수 있는 비정형 데이터보다는 전통적으로 기록되던 정형 데이터(예, 날씨, 작업량, 양중 높이)에만 의존하기 때문일 수 있다(Leung et al., 2001). 따라서 본 연구에서는 3차원 현장모델(BIM)과 타워크레인 객체를 기반으로 양중 작업의 시-공간적인 특성이 반영된 가상 데이터를 생성 및 수집하고, 이를 기계학습 기법이 적용된 회귀 분석에 활용함으로써 더욱 효과적이고 정확한 타워크레인 양중작업 소요시간의 추정이 가능함을 보여준다. 이러한 결과를 통해 타워크레인의 기계적 특성을 고려하면 기계 학습 모델이 양중작업 소요시간을 정확하게 추정하는 데 도움이 될 수 있음을 확인했다.
건설산업은 제조산업과 달리 신기술의 수용이 더 보수적인 경향이 있고, 가변적인 작업 일정과 동적으로 변화하는 현장 조건으로 인해 건설기계의 자동화 기술을 실제 도입하기까지 많은 검증의 시간이 필요하다. 하지만, 자율화 건설기기의 도입이 노동집약적이라는 건설업의 특성을 기술집약적으로 변화시키고, 그 효과가 현장 실증을 통해 점차 증명된다면 급속한 확대가 이루어질 가능성이 크다. 그러한 측면에서 본 연구는 강화학습과 같은 인공지능 기술의 성능을 사례연구를 통해 제시함으로써 건설 자동화 기술의 국내 도입에 기여할 것이라 기대된다.
