

1. 서 론
1.1 연구의 배경 및 목적
1.2 연구의 범위 및 방법
2. 디지털맵 자동분석 알고리즘 검토
2.1 디지털맵 자동분석 모듈 프레임워크
2.2 노이즈 제거 알고리즘
2.3 정합 알고리즘
2.4 GCP기반 정밀조정 알고리즘
2.5 데이터 정제화 알고리즘
2.6 변화탐지 알고리즘
3. 디지털맵 자동분석 모듈 성능분석
3.1 성능분석 데이터 셋
3.2 성능분석 결과
4. 결 론
1. 서 론
1.1 연구의 배경 및 목적
스마트건설기술 중 UAV(Unmanned Aerial Vehicles) 및 UGV(Unmanned Ground Vehicles) 및 3차원 스캐너를 활용한 현장 복원 기술은 실제 현장을 손쉽게 디지털화가 가능하다는 점에서 건설산업에 널리 적용되고 있다(Kim and Park, 2015). 하지만 UAV 및 UGV, 3차원 스캐너를 활용하여 일정 주기로 토공현장을 측정하여 디지털맵을 구축하는데에는 많은 어려움이 있다(Wang and Kim, 2019). 이는 토공현장에서 취득한 포인트 클라우드가 실내에서 취득한 데이터와 달리 넓은 공사현장을 스캐닝하여 고용량의 특성을 가지게 되는데(Kim et al., 2022), 이러한 특성을 가진 데이터는 노이즈 제거, 아웃라이어 제거, 정합 등의 데이터 처리 과정에 필요한 수작업으로 인해 3D 디지털맵을 구축하는 과정에서 많은 시간과 노력이 요구된다(Park and Kim, 2021). 이에 본 연구에서는 토공사 현장 및 도로공사 현장을 대상으로 포인트 클라우드 기반의 디지털맵 구축작업 시 발생하는 전처리작업 및 지형변화탐지 작업을 자동화하는데 중점을 두고 디지털맵 자동분석 통합모듈을 개발하고 성능을 검증하였다.
1.2 연구의 범위 및 방법
본 연구는 토공현장을 대상으로 2대 이상의 UAV 플랫폼에 의해 취득된 데이터를 활용하여 디지털맵 분석모듈을 개발 및 성능을 검증하였다. 특히, 디지털맵 생성에 요구되는 5가지 알고리즘, 즉, 노이즈 제거, 정합, GCP(Ground Control Point) 기반 정밀조정, 데이터 정제화, 변화탐지 각각에 대한 알고리즘 검토 및 성능검증을 수행하였으며 앞서 개발한 5가지 알고리즘들을 기반으로 디지털맵 자동분석 모듈을 개발하였다. 나아가 개발된 디지털맵 자동분석 모듈의 분석속도를 측정하여 모듈의 성능을 검토함으로써 모듈의 효용성을 검증하고자 하였다.
먼저, 2장에서 디지털맵 분석 알고리즘에 대한 전반적인 설명을 하기에 앞서 디지털맵 자동분석 모듈 프레임워크에 대해 제시하였으며, 제시된 프레임워크에 포함된 5가지 알고리즘의 개요 및 성능분석의 내용을 설명하였다. 3장에서는 디지털맵 자동분석 모듈의 성능분석을 수행하였다. 성능분석을 위한 데이터 셋으로 실제 토공현장을 대상으로 취득된 UAV 시계열 스캔데이터를 활용하였으며, 성능분석은 디지털맵 생성부, 디지털맵 분석부 두 부분을 나누어 성능분석을 수행하였다.
2. 디지털맵 자동분석 알고리즘 검토
2.1 디지털맵 자동분석 모듈 프레임워크
본 연구에서는 디지털맵 자동분석 알고리즘 검토에 앞서 디지털맵 자동분석 모듈 전체 프레임워크를 제안하고자 한다.
Fig. 1은 디지털맵 자동분석 모듈 프레임워크에 대해 도식화하여 나타내고 있다. UAV 및 UGV로 부터 취득된 복수 개의 포인트 클라우드 데이터가 저장되는 스토리지를 항시 확인하여 데이터가 스토리지에 저장되는 즉시, 디지털맵 자동분석 통합모듈의 Input 폴더로 이동시키도록 설계하였다. 이때 포맷변환을 통해 디지털맵 생성 알고리즘의 적합한 포맷으로 자동으로 변환시키도록 설계하였다. 이후 포맷이 변환된 복수개의 스캔데이터는 하나의 디지털맵을 생성하기 위한 첫 번째 알고리즘을 실행하였다.
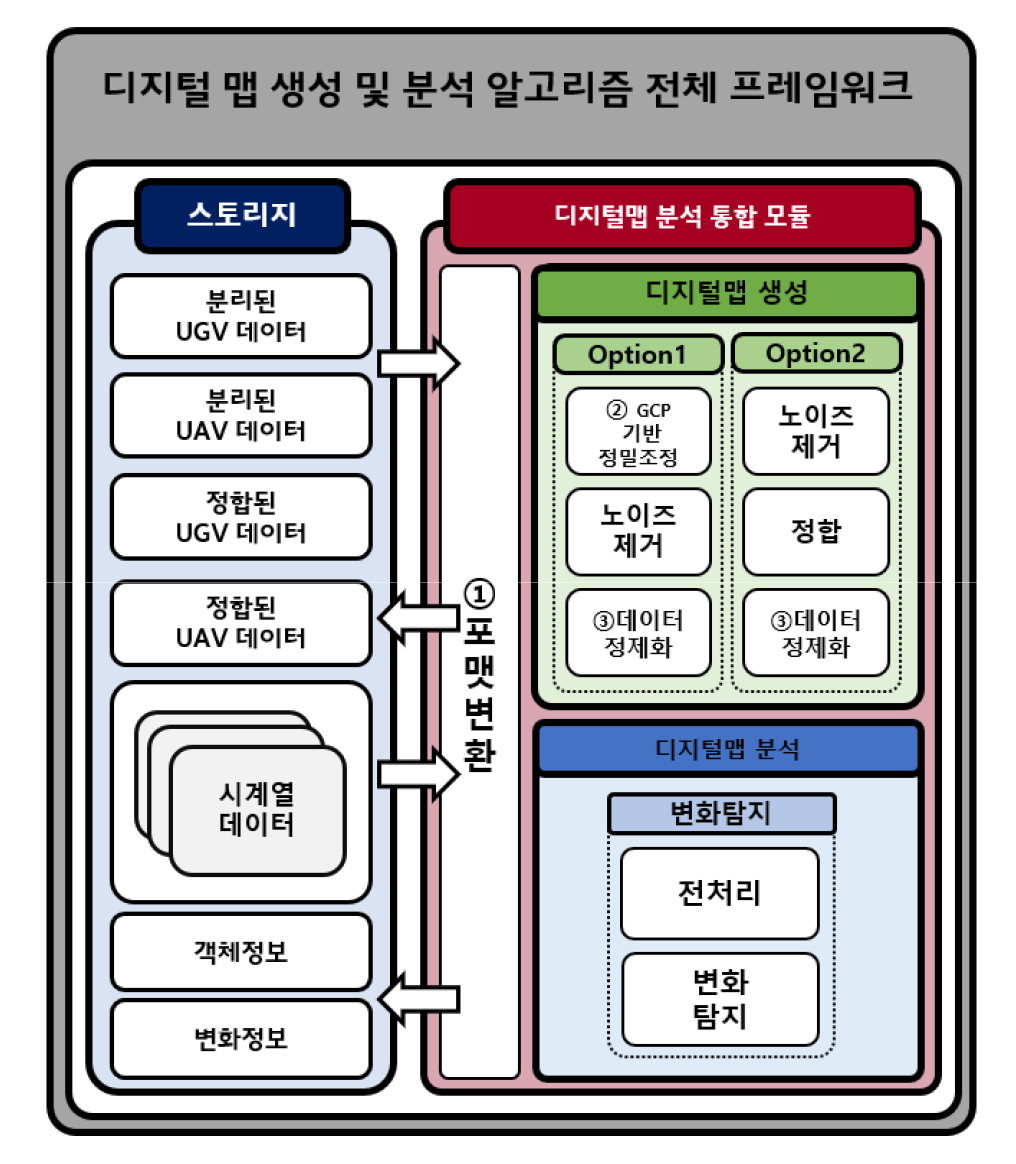
본 연구에서는 최적의 프로세스를 실행하기 위해 Option1, 2로 구분하여 디지털맵 생성 모듈을 설계하였다. 이러한 이유는 Input 데이터의 품질에 따른 최적의 프로세스를 적용하여 최고 품질의 디지털맵을 생성하기 위해서이다.
Option1의 경우 첫 번째로 정합 정확성을 높이기 위해 복수개의 스캔데이터의 대해 AI 기반 GCP 정밀조정 알고리즘을 수행하였다. GCP 정밀조정 알고리즘과 과련한 자세한 내용은 2.4절에서 서술하였다. 두 번째로 노이즈제거를 수행하여 건설현장의 먼지 및 분진에 발생된 노이즈를 제거하여 스캔데이터 품질을 높였다. 노이즈제거와 관련한 자세한 내용은 2.2절에서 서술하였다. 세 번째로는 디지털맵 생성시 발생하는 밀도 불균일 문제를 해결하기 위해 밀도정제화 알고리즘을 적용하여 데이터 경량화 및 디지털맵 생성 속도를 향상시켰다. 밀도정제화 알고리즘과 관련한 내용은 2.5절에서 서술하였다.
Option2의 경우 첫 번째로 노이즈제거를 수행하여 건설현장의 먼지 및 분진에 발생된 노이즈를 제거하였다. 일반적으로 널리 사용되는 ICP 정합 알고리즘을 활용하여 복수개의 스캔데이터 간의 좌표 위치를 일치화 시켰다. 세 번째로 Option2와 동일하게 디지털맵 밀도 정제화 알고리즘을 적용하여 데이터 경량화 및 디지털맵 생성 속도를 향상시켰다.
앞서 설명한 두 가지 옵션 중 실행프로세스의 우선순위의 경우 Option1이 먼저 실행되도록 설계하였으며 만약 Option1에서 디지털맵의 용량에 의해 실행이 어렵다면 Option2를 다시 자동으로 실행할 수 있도록 설계하였다. 이러한 이유는 Option1의 분석정확도가 Option2에 비해 비교적 높았기 때문이며 이와 관련한 내용은 2.4절에서 서술하였다. 생성된 디지털맵의 경우 자동으로 스토리지에 저장될 수 있도록 하였으며, 이때 원래의 포맷으로 자동으로 변환하여 저장할 수 있도록 설계하였다.
디지털맵 분석모듈의 경우 디지털맵 생성모듈과 동일하게 시계열 데이터에 대한 스토리지를 지속적으로 확인하여, 스토리지에 있는 시계열 Input 폴더로 이동시켰으며 이때 역시 포맷변환을 수행하였다. 이후 분석 자동화를 위해 시계열 데이터 Target, Source의 전처리 및 변화분석을 자동으로 수행하도록 한 후 Output 변화정보를 자동으로 변화정보 스토리지에 저장될 수 있도록 설계하였다. 변화분석과 관련한 내용은 2.6절에서 설명하였다.
2.2 노이즈 제거 알고리즘
대규모 비정형 건설현장을 대상으로 비정형 건설현장의 3차원 디지털맵을 구축하기 위한 PCD(Point Cloud Data) 노이즈 제거 알고리즘 개발하고자 문헌검토 및 노이즈 제거 알고리즘의 성능평가를 수행하였다. 노이즈 제거 알고리즘은 Voxel Grid Filter(VG), Bilateral Filter(BF), Moving Least Square(MLS), Edge Aware Resample Filter(EAR), Edge Aware Resample Filter(EAR), Statistical outlier Removal(SOR), Passthrough으로 다양한 노이즈 제거 알고리즘 중에서 지금까지 꾸준히 연구 및 활용되고 있는 대표적인 노이즈 제거 알고리즘을 위주로 문헌검토를 실시하였다(Park and Kim, 2020).
문헌검토 결과, 본 연구에 적합하다고 판단된 Voxel Grid Filter, Statistical outlier Removal, Passthrough 알고리즘을 비정형 건설현장의 디지털맵에 적용하여 노이즈 제거 알고리즘 성능 테스트를 실시하였다. 성능평가의 결과로 Voxel grid 알고리즘이 다른 알고리즘에 비해 상대적으로 노이즈 제거 성능과 객체의 보존력이 우수한 것으로 나타났다(Park and Kim, 2020).
2.3 정합 알고리즘
UAV 및 UGV를 활용하여 수집한 포인트 클라우드 데이터의 정합법은 크게 거친정합법(Coarse registration methods)과 미세정합법(Fine registration methods)으로 구성되어 있다(Park and Kim, 2021). 본 연구는 비정형 현장에서 수집한 데이터를 효과적으로 정합하는 방안을 도출하기 위해 기존 문헌검토를 수행하였다.
문헌검토 결과로 본 연구의 대상인 비정형 건설현장의 특성을 고려하여 X,Y,Z의 3축 방향으로 이동 및 회전하는 ICP(Iterative approximation method) 알고리즘이 타당한 것으로 나타났다. 그러나, ICP 알고리즘은 초기정합이 전체 정합의 결과에 영향을 주는 특성이 있다(Kim et al., 2018).
따라서 초기정합의 정확도 향상을 위해 3D 디지털맵 정합 시 GNSS 및 GCP를 병행하여 정합을 수행하는 방안이 오차를 줄일 수 있을 것으로 판단되었다. 다음 2.4절에서 GNSS 및 GCP를 활용한 관련 기술에 대해 자세히 설명하였다.
2.4 GCP기반 정밀조정 알고리즘
UAV의 비행 고도, 환경 조건, 식생 분포 및 비행시간과 같은 영향 요인에 의해 UAV 기반 포인트 클라우드에 오차가 발생하는 것을 파악할 수 있다(Julge et al., 2019). 이를 극복하기 위해 GCP를 자동 인식하고 정확도를 향상시키는 정밀조정 프레임워크를 개발하였다. 정사영상에서 GCP를 인식하는 AI 기반 객체인식 방법론과 3D PCD 분석 알고리즘들을 검토 및 통합하여 GCP 중심의 3차원 좌표를 계산하고 GNSS 좌표와 오차를 최소화하는 자동화 프레임워크를 개발하였다.
AI 기반 객체인식 데이터 제작 및 학습을 위해 실제 도로건설현장에서 UAV 데이터를 수집하였다. 훈련 이미지 전처리 및 증강 방법을 활용하여 총 22,379장의 480 × 480 픽셀 이미지를 제작하고 훈련에 사용하였으며 YOLOv5모델의 평균 정확도 mAP@[0.5]는 1.0, mAP@[0.5:0.95]는 0.7749을 달성하였다(Choi et al., 2022).
개발한 프레임워크를 실제 도로건설현장에 적용하여 성능을 테스트하였다. 프레임워크는 약 20,000 × 10,000 픽셀 이상의 고해상도 정사영상에서 GCP를 오분류 없이 자동 인식하였다. 3개의 PCD에서 정밀조정을 수행한 결과, 기존 ICP 대비 모든 데이터의 정확도가 50%이상 향상되었으며 최종 정확도는 0.8cm-3cm 이내였다. 프레임워크 수행 시간은 총 30초 미만으로 실제 현장에 적용하기에 타당함을 확인하였다(Choi et al., 2022).
2.5 데이터 정제화 알고리즘
여러 대의 드론이 각 구역에 대한 스캔데이터를 취득 후 정합 및 병합함으로써 하나의 건설현장 디지털맵을 생성하고 있으며, 정합 및 병합과정에서 데이터간 중첩부분과 비중첩부분의 밀도 불균일 문제가 발생하는 것을 확인하였다.
본 연구에서는 밀도 불균일 문제를 해결하기 위한 새로운 프로세스를 개발하였다. 프로세스는 (1) 데이터 취득 및 정합 (2) 중첩 및 비중첩 스캔데이터 분류 (3) 비중첩 데이터간 병합으로 총 3단계로 수행하였다(Kim et al., 2022).
특히, 개발 알고리즘에서는 조감도 형태의 토공현장 스캔데이터 특징을 고려해 Pixel Grid를 활용함으로써 스캔데이터를 구조화하였으며 구조화된 Pixel에 대해 Source와 Target 데이터를 투영시키고 AND 연산을 통해 중첩 및 비중첩 부분을 분류하도록 하였다(Kim et al., 2022).
2.6 변화탐지 알고리즘
국내외 문헌검토를 통해 점군데이터의 대표적인 거리비교 방법인 C2C(Cloud to Cloud Comparison), M3C2(Multiscale Model to Model Cloud Comparison), C2M(Cloud to Mesh Comparison), DoD(DEM of difference)에 대한 특성 및 적용사례 등을 검토하였다(Qin, 2014).
특히, 도로건설현장 데이터를 이용하여 C2C, M3C2, C2M, DoD의 성능을 검토함으로써 현장적용의 최적 거리비교 알고리즘을 C2C로 도출하였다. 점군데이터간 변화탐지의 최종 산출물인 변화정보를 추후 시각적 및 수치적 분석의 데이터로 활용될 것을 감안해 PCD(x,y,z,r,g,b), CSV(x,y,z,distance,r,g,b)의 2가지 형태로 설정하였다. 점군데이터간 거리비교에는 C2C 알고리즘 및 KD-tree 방법론을 이용하여 알고리즘을 구현하였다.
변화탐지 알고리즘의 성능향상을 위한 분석데이터인 전처리 UAV 및 UGV를 통해 얻어지는 점군 데이터의 범위는 현장의 여건, 공사진척도 등에 취득 및 분석 범위가 상이한 것을 확인하였다. 이를 통해 점군 데이터 분석시 발생할 수 있는 정확도 및 속도 저하 방지를 목적으로 2차원 격자를 이용하여 스캔데이터간 분석범위를 동일화하는 전처리 과정을 추가하였다.
3. 디지털맵 자동분석 모듈 성능분석
3.1 성능분석 데이터 셋
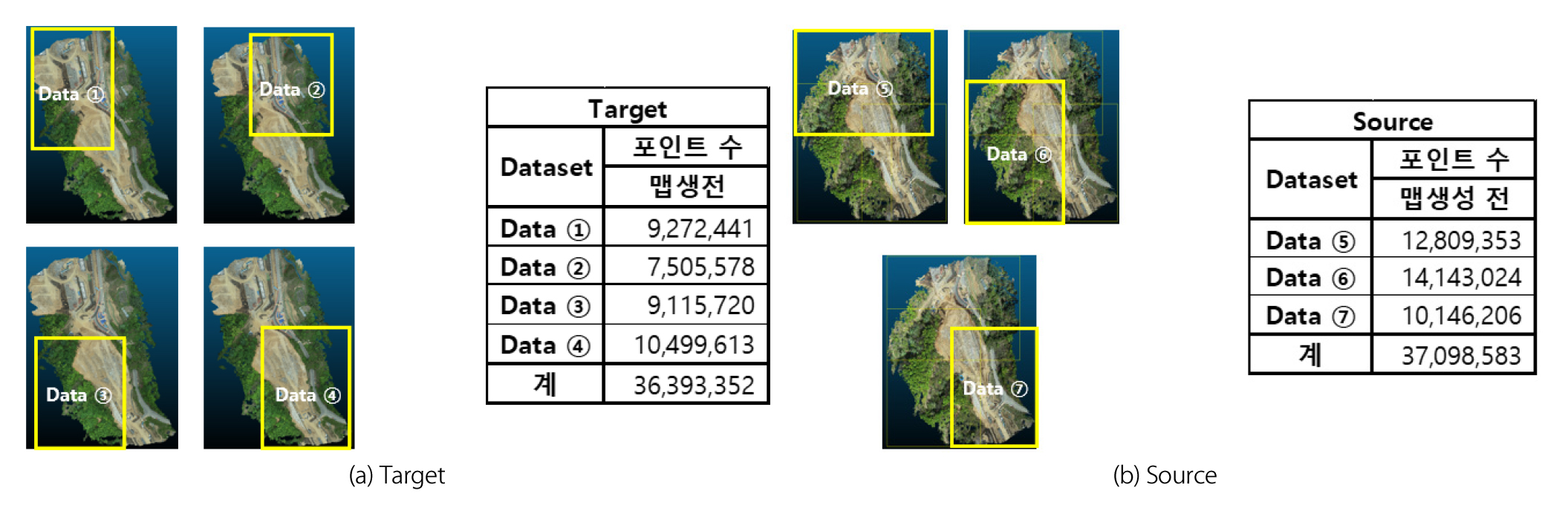
본 연구에서는 디지털맵 자동분석 모듈의 성능검증을 수행하였다. 성능검증에 사용된 데이터 셋은 도로건설현장에서 촬영한 UAV 시계열 데이터를 활용하였다. 이때 취득된 시계열 데이터의 경우 여러 대의 드론이 각 구역별로 촬영하지 않고 1대의 드론이 현장 전체를 한번에 찍었다. 이러한 점을 고려해 여러 대의 드론이 각 구역별로 촬영을 하는 것을 가정하여 데이터 가공을 수행하였다. 먼저 시계열 데이터 중 먼저 촬영된 데이터를 Target 데이터로 하여 총 4구역의 스캔데이터를 각각 촬영한 것을 가정하여 데이터를 4개의 데이터로 Crop 하였다. 또한 이후 촬영한 Source 데이터를 총 3구역에서 각각 촬영한 것으로 가정하여 3개의 데이터로 Crop 하였다. Crop은 중첩률 약 70~80%로 설정하여 수행하였다. 취득된 스캔데이터 점개수의 경우 800~1,300만개로 모든 데이터는 UAV 데이터로부터 취득된 Raw 데이터의 점밀도를 적용하였다. Fig. 2에서는 실제 사용된 Target 및 Source 데이터셋의 형태와 점 개수를 나타내고 있다.
3.2 성능분석 결과
본 연구에서는 토공현장을 대상으로 UAV를 통해 취득 및 가공한 성능검증 데이터셋을 활용하여 성능검증을 수행하였다. 성능검증은 디지털맵 생성부와 디지털맵 분석부 각각의 속도를 테스트를 수행하였다. 이는 대규모 토공 현장의 PCD분석을 현장내 공사감독관이 낮은 컴퓨팅 파워를 가진 PC로 정해진 작업 시간 내에 완수를 해야 한다면, 여러 성능의 차원 중에서도 분석시간이 매우 중요하기 때문에 성능분석을 속도를 평가지표로 설정하였다.
테스트 방법은 4개의 Target 데이터를 활용하여 1개의 Traget 디지털맵을 생성하고 이후 다시 3개의 Source 데이터를 활용하여 1개의 Source 디지털맵을 생성하도록 하여 총 두 번의 디지털맵 생성 프로세스를 수행하였다. 이후 생성된 Target과 Source 데이터를 활용하여 디지털맵 분석을 수행 후 변화정보를 생성하도록 하였다. 특히 생성부의 경우 Option1과 Option2 두 가지를 모두 테스트했다.
디지털맵 생성부의 테스트 결과는 Fig. 3와 Fig. 4에서 나타내고 있다. Option1의 경우 Target 생성소요시간은 8.44분, Source 생성소요시간은 9.88분가 소요되었으며 Option2의 경우 Target 생성소요시간은 7.38분 Source 생성소요시간은 8.08분이 소요되었다. Target 데이터 셋이 Source 데이터 셋에 비해 용량이 비교적 커, 보다 속도가 오래 걸린 것으로 판단된다. Option1과 Option2를 비교하면, Option1이 1분 정도 느린 처리속도를 보인다. 이러한 이유는 Option1의 경우 GCP기반 정밀조정 부분의 프로세스가 추가되었기 때문으로 판단된다.


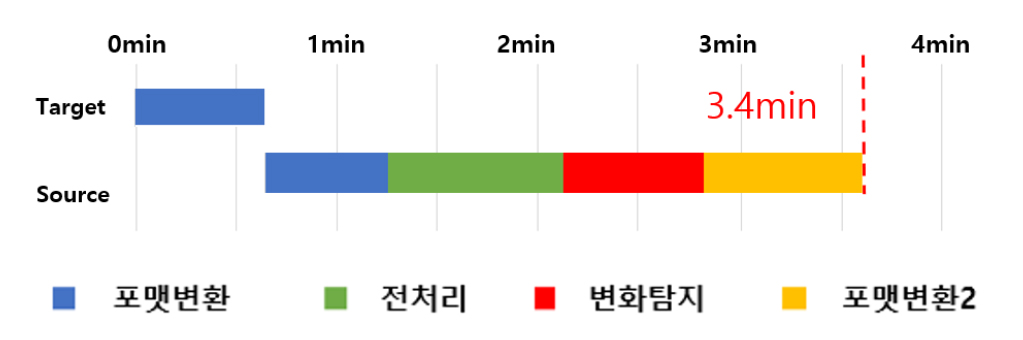
디지털맵 분석부의 테스트 결과는 Fig. 5에서 나타내고 있다. 테스트 결과 Target 데이터와 Source데이터를 활용한 변화분석에 소요된 시간은 약 3.4분이다. 디지털맵 생성부에 비해 비교적 빠른 속도를 보였다.
디지털맵 자동분석의 1회 동작의 기준을 디지털맵 생성 2회, 디지털맵 분석 1회로 가정하였을 경우 총 약 18분~23분 사이의 성능을 도출하였다.
4. 결 론
본 연구는 디지털맵 자동분석 모듈을 개발 및 성능을 검증하였다. 2장에서 디지털맵 자동분석 알고리즘을 검토하여 디지털맵 생성 및 분석하기 위한 최적의 알고리즘을 도출함으로써 디지털맵 자동분석 모듈에 탐재된 알고리즘을 제시하였다. 3장에서는 개발된 디지털맵 자동분석 모듈의 성능 테스트를 수행하여 디지털맵 분석 1회에 약 18분~23분 사이의 분석소요시간을 보여 일반산업 현장에서 디지털맵 생성주기 등을 고려하였을 때 개발모듈의 처리성능이 현장에 적용하기에 충분한 수준인 것으로 판단된다.
본 연구는 디지털맵 생성을 위한 최적의 알고리즘 검토 후 이를 기반으로 데이터 처리 프로세스를 설계하고 디지털맵 자동분석 모듈을 개발하였다. 모든 프로세스가 인력의 개입 없이 자동을 실행된다는 점에서 타 디지털맵 생성 및 분석 소프트웨어와의 차별성이라고 할 수 있다. 또한 실제 토공현장에서 취득된 스캔데이터를 활용하여 디지털맵 자동분석 모듈의 성능의 우수성과 효용성을 검증하였다는 점에서 건설 자동화 발전에 기여하길 기대한다.
